ОСНОВЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
44
{ } { }
e
N f
δ =
] [
,
(2.6)
где компоненты
] [
N
являются в общем случае функциями положения,
а
{ }
e
δ
представляют собой перемещения узловых точек рассматриваемого
элемента.
В случае плоского напряженного состояния вектор-столбец
{ }
=
) ,(
) ,(
yxv
yxu
f
содержит горизонтальное и вертикальное перемещения типичной точки внутри
элемента, а перемещения отдельного узла выражаются формулой
{ }
=
i
i
i
v
u
δ
.
y
v
i
i
u
i
e
j m
x
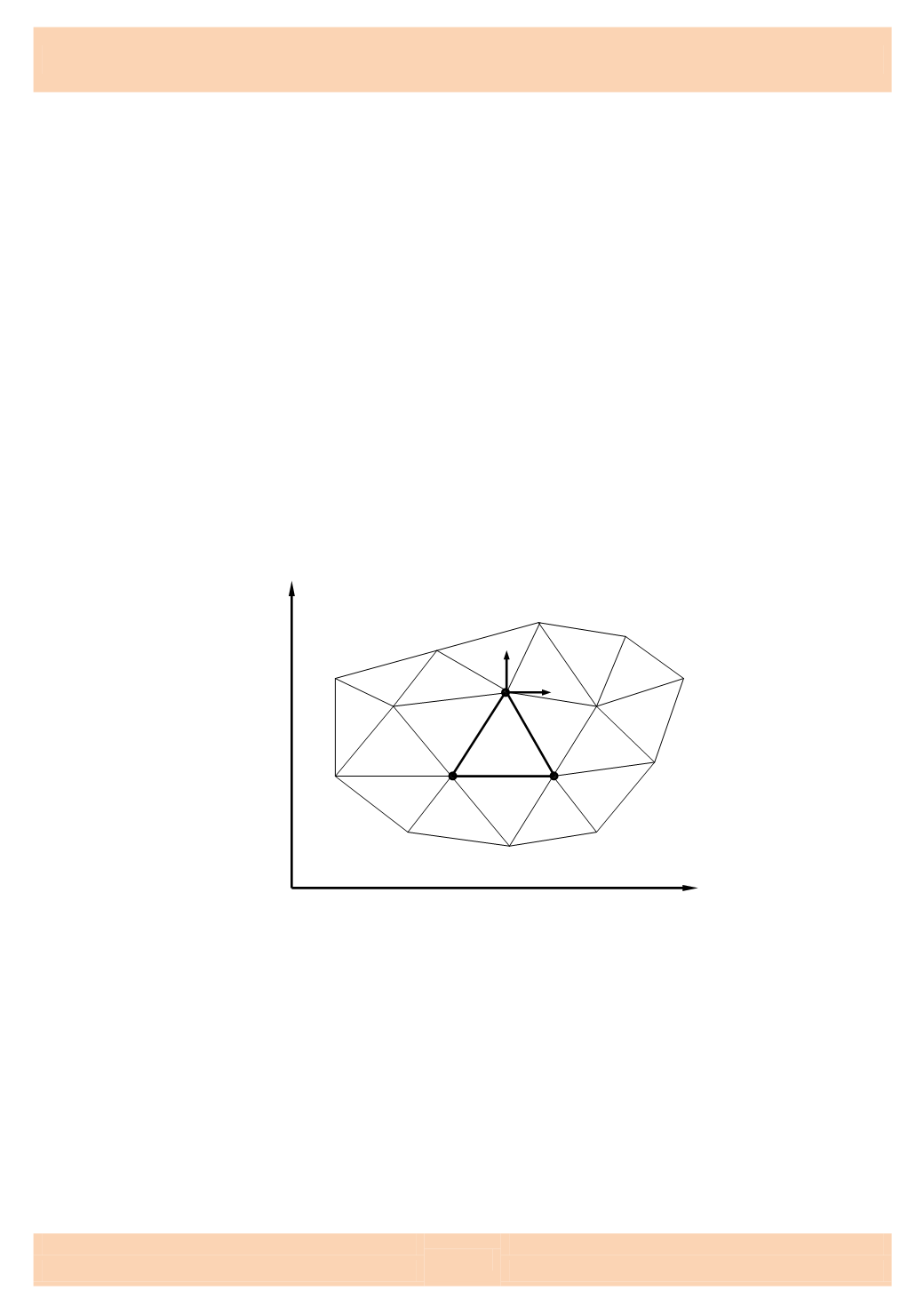
Рис. 2.3. Треугольный элемент в плоской области
Перемещения всех трех узлов представляются в виде вектора
{ }
=
m
j
i
e
δ
δ
δ
δ
.


