" Н а у к а м о л о д ы х " , 3 0 - 3 1 м а р т а 2 0 1 7 г . , А р з а м а с
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
378
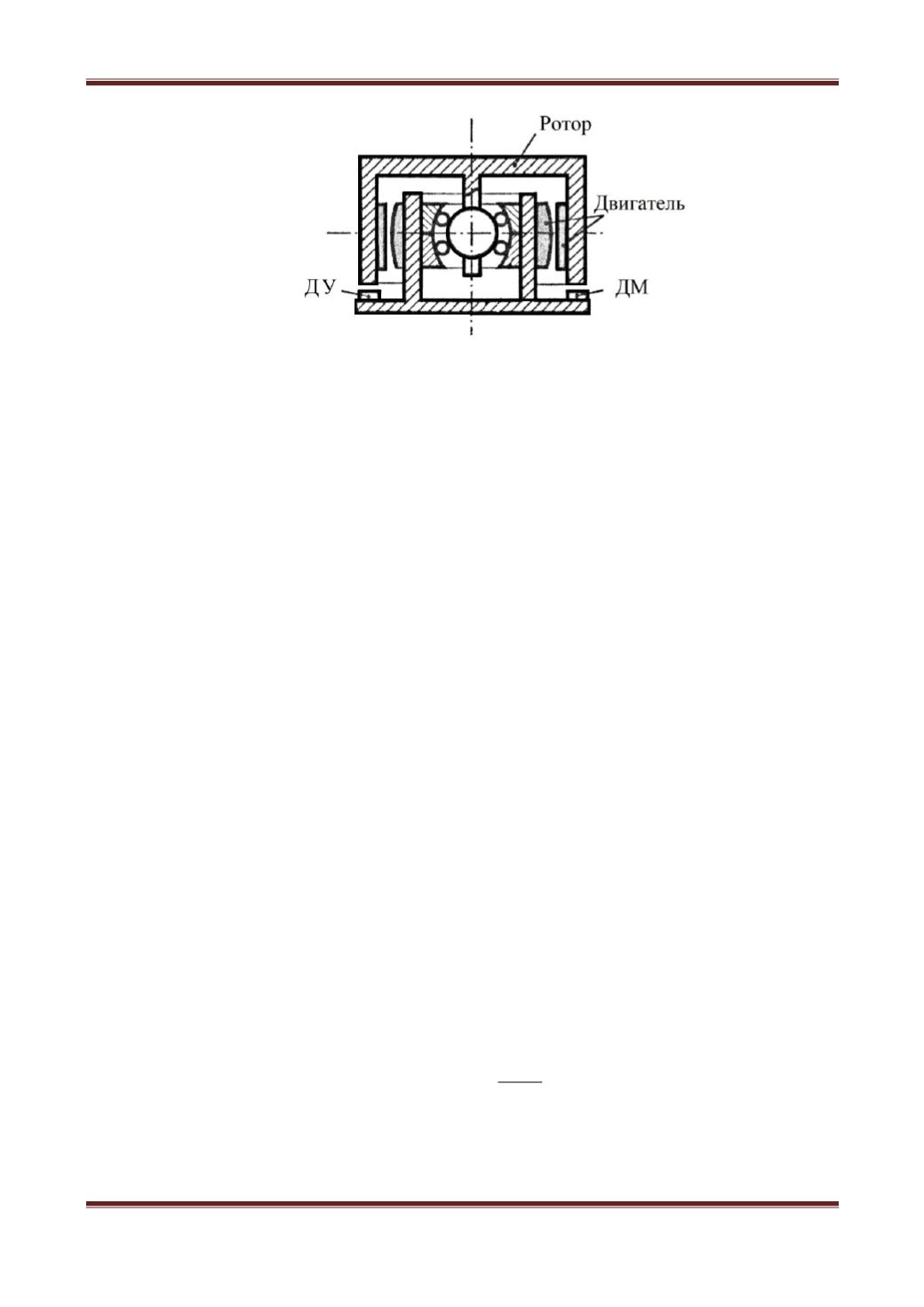
Рис. 1 – Конструктивная схема
Он состоит из колоколообразного ротора на сферической
шарикоподшипниковой опоре и основания с размещенными на нем торцевыми
сердечниками с катушками, образующими взаимоиндуктивный датчик угла
(ДУ) и электромагнитный датчик момента (ДМ).
Конструктивной особенностью такой схемы построения является то, что
измерительные оси ДУ и собственные оси гироскопа, по которым размещены
электромагнитные ДМ, развернуты относительно друг друга на угол 45
°
,так как
расположить их по одним осям не представляется возможным из-за
ограничения по габаритам.
Для получения управляющего сигнала в составе гироскопа используется
электронный блок преобразования координат, который по сигналам двух
датчиков угла формирует сигнал, пропорциональный углу поворота ротора
относительно собственных осей.
Использование блока преобразования координат ведет к снижению
быстродействия, увеличению энергопотребления, а также снижению
надежности системы в целом.
Целью данной работы является исследование возможности создания
совмещенного взаимоиндуктивного ДУ и электромагнитного ДМ.Основной
идеей объединения функций датчиков угла и момента является использование
двух Ш-образных сердечников, с расположенными на них катушками
возбуждения и сигнальными обмотками взаимоиндуктивного датчика угла и
катушками управления электромагнитного датчика момента.
Задачей ДУ является формирование напряжения, пропорционального
углу поворота ротора. Основным параметром ДУ является крутизна его
статической характеристики – отношение действующего значения выходного
напряжения
ДУ
U
к углу поворота ротора
α
:
α
=
ДУ
ДУ
U
К
,
Задачей ДМ является создание момента
ДМ
М
, компенсирующего
гироскопический момент при наличии угловой скорости (при работе гироскопа
в режиме измерения угловой скорости) или создание управляющего момента


