М а т е р и а л ы X В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
397
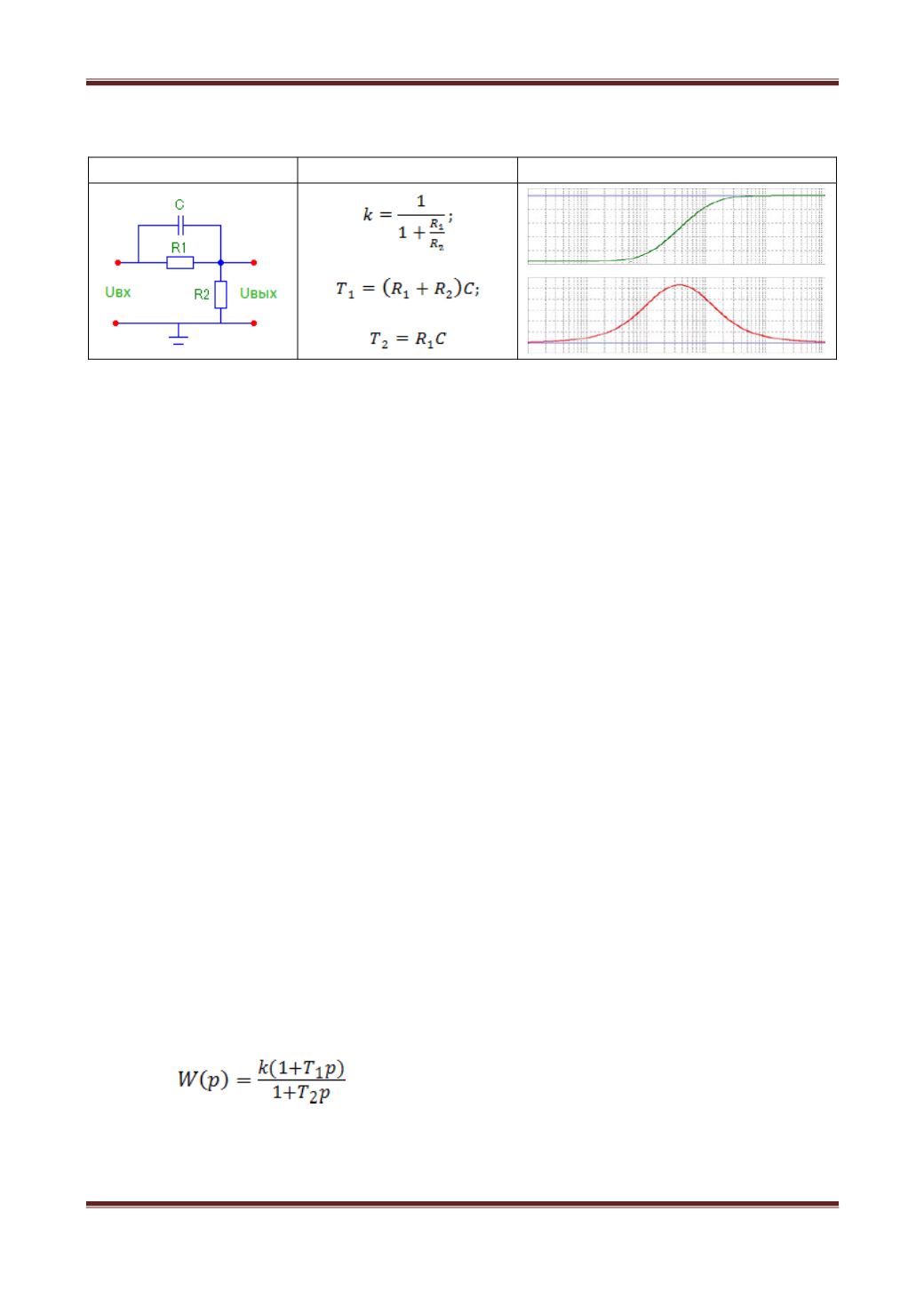
Таблица 1 – Дифференцирующее звено
Схемаконтура
Постоянные
ЛАЧХ и ЛФЧХ
Достоинство коррекции САУ с помощью дифференцирующих
устройств (введение производных) состоит в том, что с увеличением
коэффициента усиления системы как следствие повышается и ее частота
среза, т.е. со снижением динамической ошибки удается уменьшить и время
переходного процесса. Недостатком данной коррекции является внос
значительного ослабления в области низких частот (область частот спектра
полезного
сигнала).
Чем
большее
опережение
обеспечивает
дифференцирующее устройство, тем интенсивнее это ослабление, для его
компенсации необходимо увеличивать коэффициент усиления всей системы.
Высокие частоты дифференцирующее устройство пропускает без
ослабления. Следовательно, если на полезный сигнал накладываются
помехи, то они будут пропускаться без ослабления. Ослабление полезного
сигнала в области низких частот, и пропускание помех на высоких частотах,
приводят к уменьшению отношения сигнала к помехам, что может является
причиной увеличения динамических ошибок всей системы стабилизации.
В этом случае система должна удовлетворительно пропускать сигнал и
наиболее эффективно подавлять помехи. Задающее воздействие обычно
представляет собой медленно изменяющуюся функцию времени и поэтому
его частотный спектр является узким, расположенным в области низких
частот. Помехи же изменяются быстрее во времени, поэтому имеют более
высокочастотный спектр, чем задающее воздействие. Следовательно, для
получения минимальных ошибок при наличии помех система должна иметь
узкую полосу пропускания в области низких частот (малую частоту среза)
[2].
2)
–при T
2
>T
1
реальное интегрирующее звено (табл. 2),
(при
T
1
>T
2
звено
дифференцирующего
действия).


