" Н а у к а м о л о д ы х " , 3 0 - 3 1 м а р т а 2 0 1 7 г . , А р з а м а с
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
400
Таблица 4 –
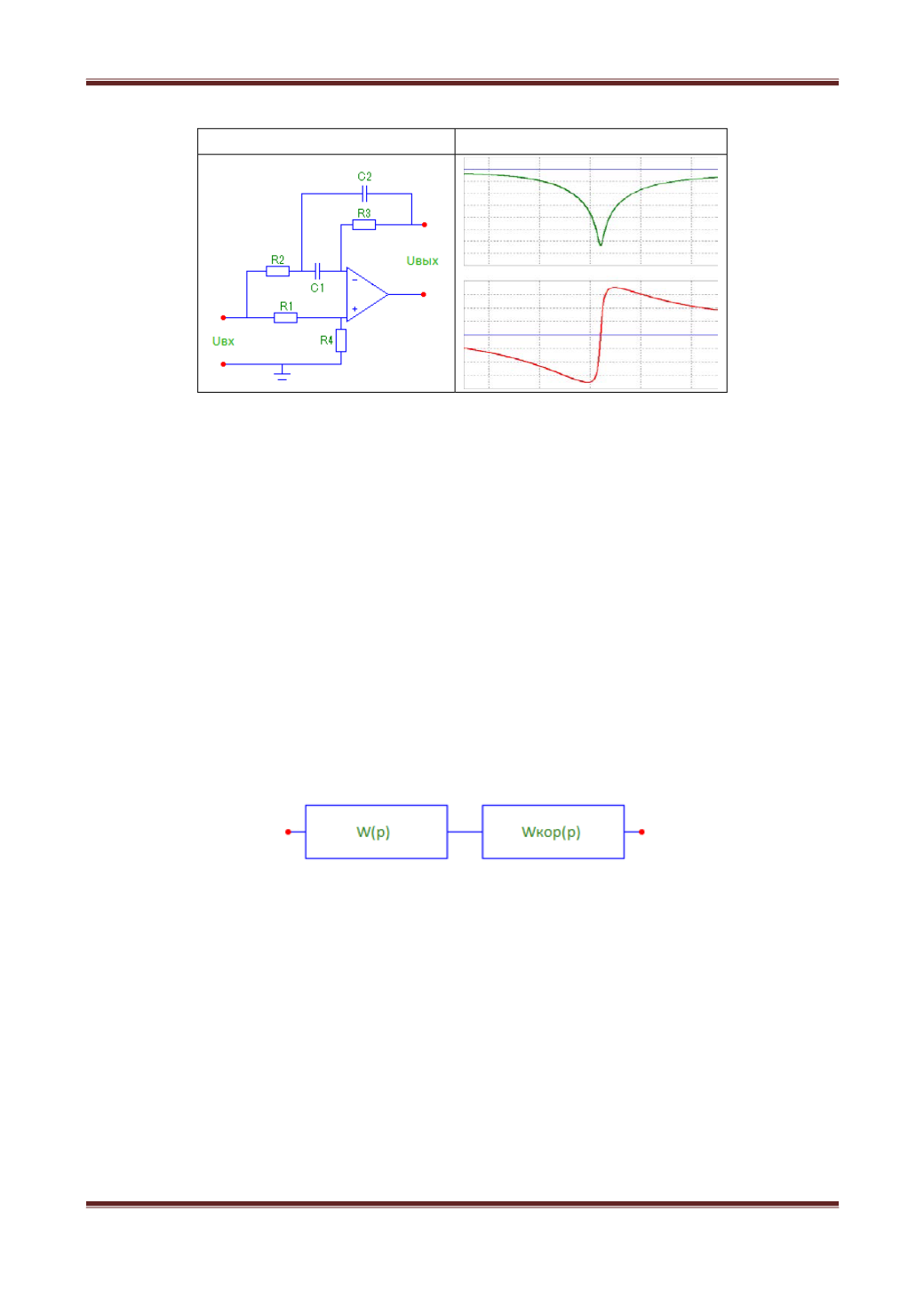
Активное звено
Схемаконтура
ЛАЧХ и ЛФЧХ
Так, при больших сигналах рассогласования нелинейное КУ уменьшает
демпфирование системы стабилизации, что в свою очередь приводит к
расширению полосы пропускания и к более быстрой реакции всей системы, а
при уменьшении сигнала рассогласования - увеличивается демпфирование, и
сужается полоса пропускания, замедляется реакция системы, и как следствие
снижается величина перерегулирования. Для коррекции импульсных систем
стабилизации применяют как импульсные, так и непрерывные КУ.
Непрерывные КУ преобразуют непрерывные сигналы, а импульсные
реализуются в виде импульсных фильтров или цифровых вычислительных
устройств. Специфические КУ импульсных систем - КУ, осуществляющие
изменения формы управляющих импульсов.
Последовательная коррекция (рис. 2) вносит в закон управления
составляющие,
пропорциональные
производным
(дифференцирующие
контуры) и интегралу (интегрирующие контуры) от сигнала ошибки.
Последовательные корректирующие звенья могут быть также построены
на механических элементах, в частности, на пружинах и демпферах.
Достоинством последовательной коррекции является ее простота, недостатком
является то, что к стабильности элементов последовательной коррекции
предъявляются повышенные требования т.к. в процессе ее эксплуатации
изменяются параметры последовательно соединенных элементов системы
(коэффициента усиления, постоянные времени).
Встречно-параллельная коррекция (рис. 3), реализующаяся с помощью
введения в систему местной обратной связи (ОС), позволяет, при гибкой ОС –
уменьшить колебательность переходного процесса (приблизить его к
монотонному), а при жесткой ОС – время регулирования.
Рис.2. Последовательная коррекция


