" Н а у к а м о л о д ы х " , 3 0 - 3 1 м а р т а 2 0 1 7 г . , А р з а м а с
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
396
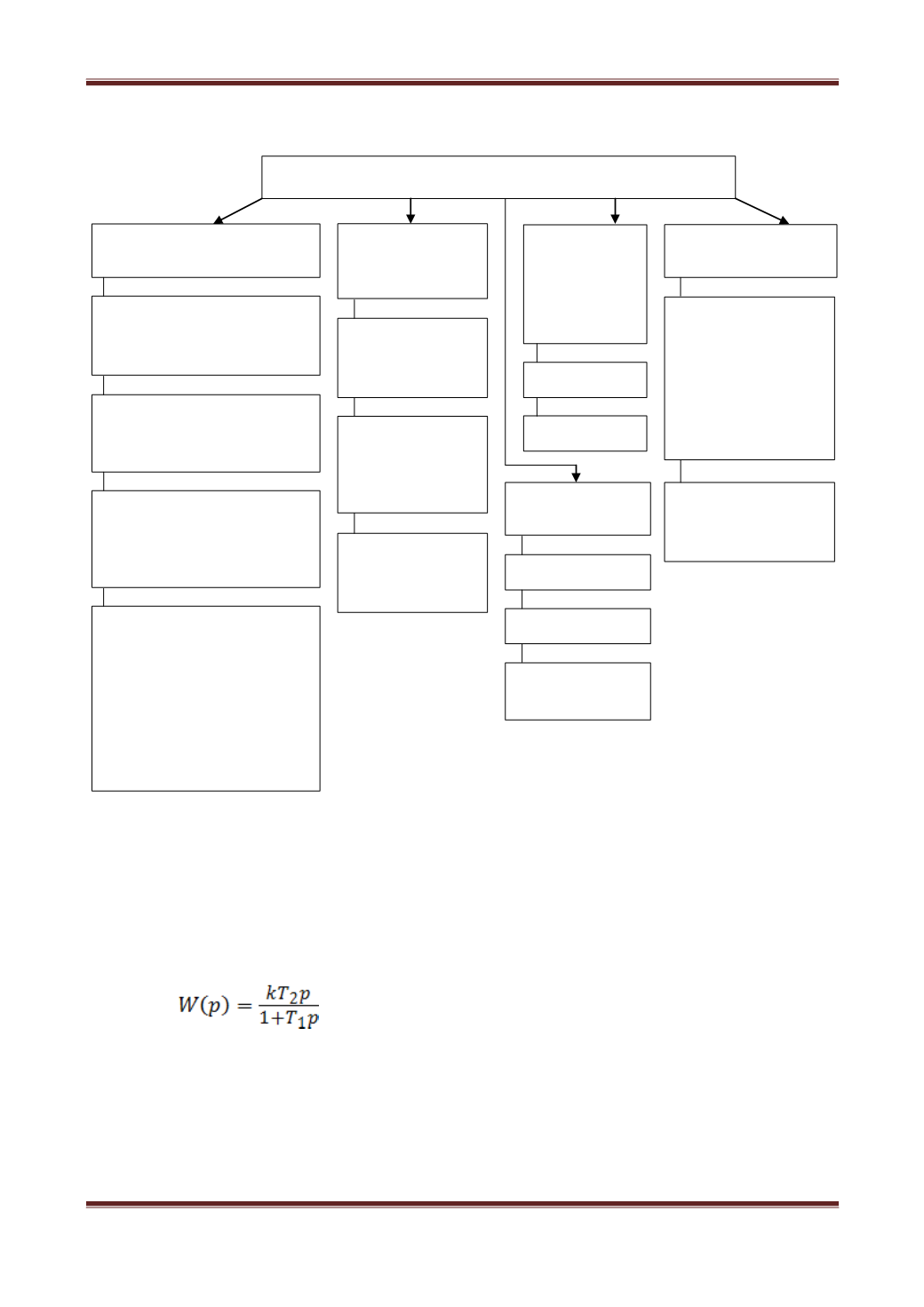
На рисунке 1 приведена классификация корректирующих устройств,
применяемых в САУ [1].
Рис. 1. Классификация корректирующих устройств
Простейшими КУ являются пассивные четырехполюсники, состоящие
из резисторов и емкостей (если сигналы электрические - используются RC-
цепи, если не электрические, то используются их механические аналоги) и
реализующие следующие основные передаточные функции:
1)
– реальное дифференцирующее звено (табл. 1)
(
k
- коэффициент передачи,
p
- оператор Лапласа
T
1
,
T
2
- постоянные времени).
Классификация корректирующих устройств
По способу
включенияв САУ
Последовательные
(включаемые в прямую
цепь)
Встречно-параллельные
(включаемые в местную
обратнуюсвязь)
Параллельные
(включаемые параллельно
одному из элементов
системы)
Комбинированноготипа
(включаемые по
основному возмущающему
воздействию (нагрузке) в
системах стабилизации
или задающему
воздействию в следящих
системах)
По характеру
преобразуемого
сигнала
На постоянном
токе
(непрерывные)
Дискретные
(в цифровых
системах
)
На переменном
токе
(модуляция
сигналов)
По виду
зависимости
выходных
сигналов от
входных
Линейные
Нелинейные
По способу
осуществления
Пассивные
(не содержат
источников
энергии, сигнал при
прохождении
частично
ослабляется)
Активные
(содержащиеусили
тели)
По принципу
действия
Электро-
механические
Электрические
Механические


