" Н а у к а м о л о д ы х " , 3 0 - 3 1 м а р т а 2 0 1 7 г . , А р з а м а с
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
398
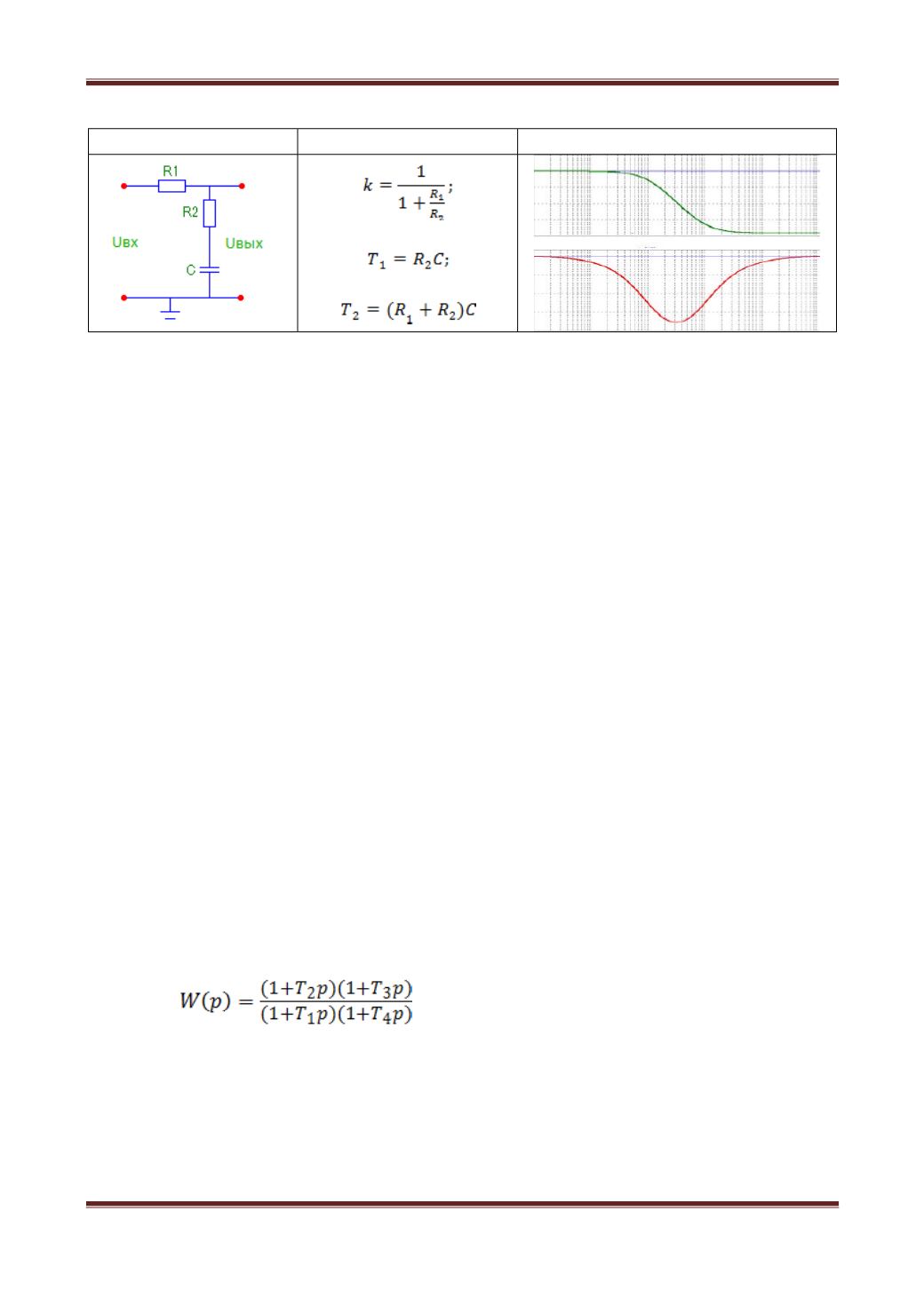
Таблица 2 – Интегрирующее звено
Схема контура
Постоянные
ЛАЧХ и ЛФЧХ
Для уменьшения уровня шумов и помех систему следует
корректировать
интегрирующим
контуром,
который
увеличивает
коэффициент усиления, не повышая частоту среза системы. Также помощью
интегрирующего контура осуществляют коррекцию систем, для которых
требуется большой коэффициент усиления (высокая динамическая точность).
При повороте стабилизированной платформы, на которой установлен
гироскоп, его ротор также поворачивается на угол, пропорциональный углу
поворота платформы (угол прецессии). Если входной сигнал - угловая
скорость платформы, а выходной угол прецессии, то такой гироскоп можно
описать интегрирующим звеном. Недостатком такого гироскопа является то,
что он имеет ограниченные углы прецессии, и при существенных колебаниях
платформы ротор гироскопа ложится на упоры, и гиростабилизатор
перестает выполнять свои функции. Т.е. интегрирующее звено имеет зону
ограничения.
Интегрирующий контур пропускает низкие частоты без ослабления, а
высокие с ослаблением и, следовательно, хорошо пропускает спектр
полезного сигнала, расположенный в области низких частот, и подавляет
высокочастотные помехи. На основании этого свойства интегрирующий
контур и используется обычно для коррекции САУ при наличии помех.
Недостатком коррекции с интегрирующим контуром является то, что наряду
с уменьшением установившейся ошибки ухудшается переходный процесс
системы [2].
3)
– реальное интегро-дифференцирующее
звеноT
1
>T
2
>T
3
>T
4
(табл. 3)


