М а т е р и а л ы X В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
401
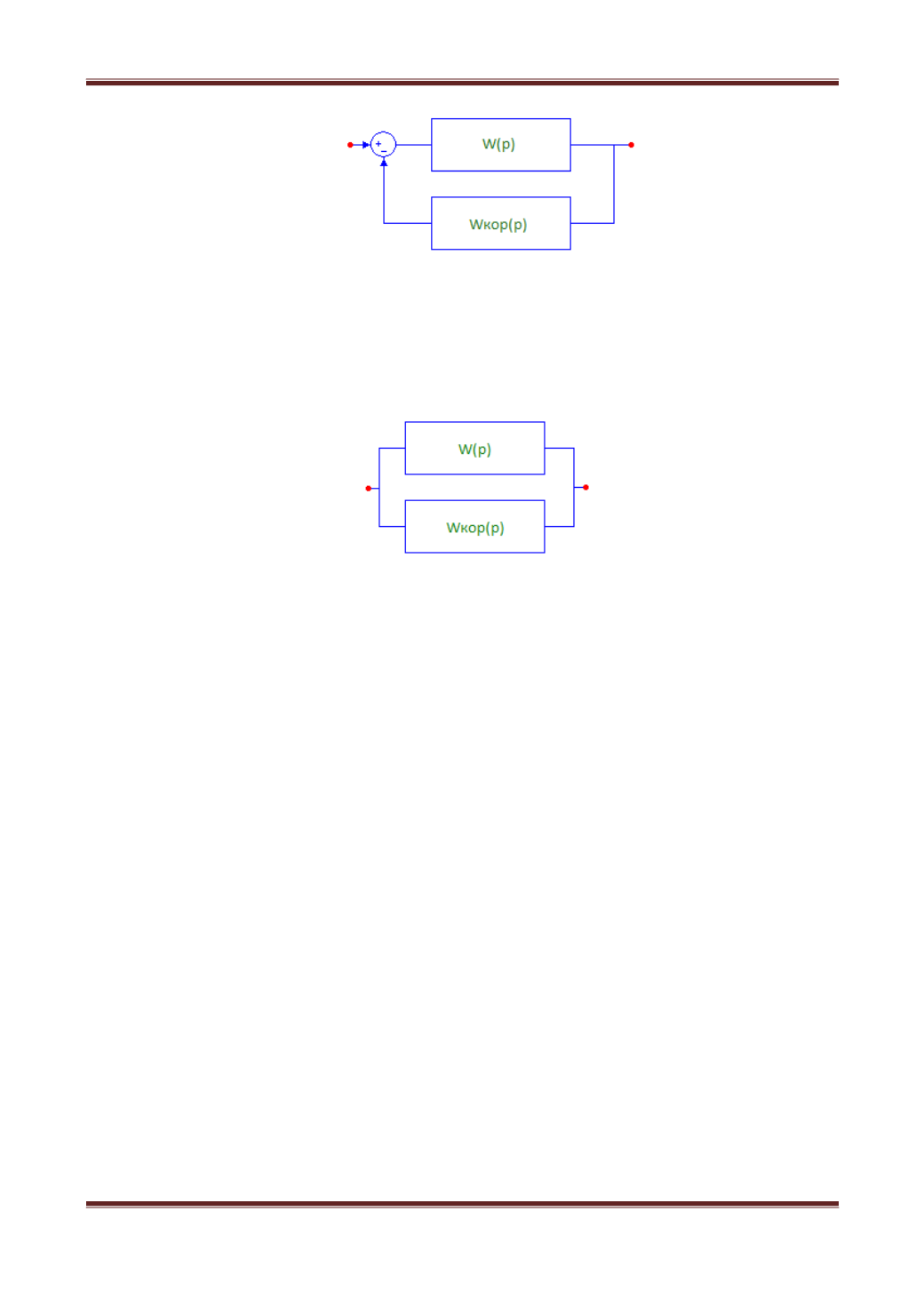
Параллельную коррекцию (рис. 4) реализуют, подключая КУ параллельно
одному из элементов системы. Возможность коррекции САУ параллельными
корректирующими устройствами исходит из возможности замены
последовательного КУ равносильным параллельным.
При жесткой обратной связи (действует в переходном и в
установившемся режимах) на вход охваченного ею звена (звеньев) подается
величина, пропорциональная выходной величине этого звена (звеньев). При
гибкой обратной связи (действует только в переходном режиме) на вход
охваченного ею звена подается величина, пропорциональная первой (второй и
т.д.) производной от выходной величины этого звена.
Достоинства коррекции с помощью обратной связи состоят в следующем:
- поскольку часть системы, охваченная обратной связью, в основном
определяется обратной величиной передаточной функции параллельного КУ,
то требования к ее элементам, в отличие от последовательной коррекции, могут
быть не такими жесткими;
- нелинейные элементы «линеаризуются» в связи с тем, что передаточные
функции охваченного обратной связью участка определяются параметрами
контура в цепи обратной связи;
- питание корректирующих устройств охваченных обратной связью не
представляет трудностей, так как обратные связи зачастую охватывают
конечные звенья системы с мощным выходным сигналом, следствием этого
является и низкий уровень шумовых помех, так как сигнал проходит через всю
систему, которая в свою очередь является хорошим фильтром нижних частот;
Недостатки коррекции с помощью обратной связи:
Рис. 4. Параллельная коррекция
Рис. 3. Встречно-параллельная коррекция


