" Н а у к а м о л о д ы х " , 2 6 н о я б р я 2 0 1 9 г . , А р з а м а с
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
448
фирмы ОВЕН время цикла составляет 1 с, тогда регулятор (2) в дискретной
форме:
1 1
1
5.24
28.57
4.2 1
р р
z
W z
z
z
.
(3)
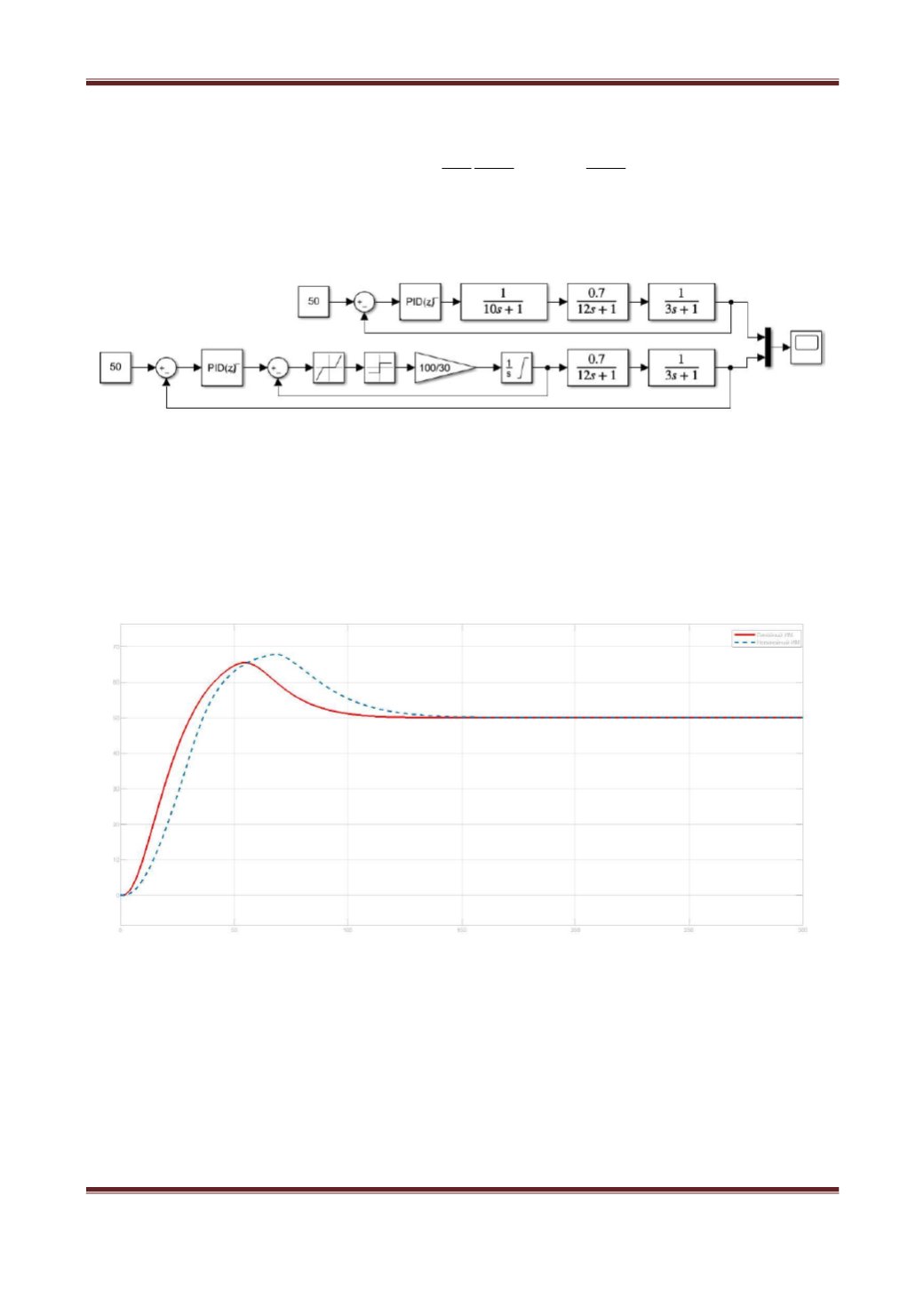
На рис. 4 представлена Simulink-модель, которая содержит две системы
регулирования расхода воды, первая включает в себя непрерывный ПИД-
регулятор (2), а вторая – дискретный ПИД-регулятор (3).
Рис. 4. Численная модель системы регулирования расхода воды в Simulink
Численное моделирование показывает разницу переходных процессах
(рис. 5) в замкнутой системе с непрерывным (2) и дискретным (3)
регуляторами. Замкнутая система с дискретным регулятором ведет себя иначе,
так как она учитывает ограничение амплитуды выходного значения регулятора
ТРМ, а также дискретность выхода регулятора, равной 1 с.
Рис. 5. Сравнение переходных процессов с непрерывным (2) и дискретным (3) ПИД-
регулятором
Литература
1. Емельянов С.В. Системы автоматического управления с переменной
структурой. Наука, 1967 г., 336 с.
2. Данилушкин И.А., Лежнев М.В. Структурное представление процесса
теплообмена
при
встречном
направлении
взаимодействующих
потоков // Вестник Самарского государственного технического университета.


