М а т е р и а л ы X I I В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
347
ПЕРЕКРЕСТНЫЕ СВЯЗИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО
ГИРОСКОПА, РАБОТАЮЩЕГО В РЕЖИМЕ ДАТЧИКА УГЛОВЫХ
СКОРОСТЕЙ
Н.В. Маркеев
магистрант, Арзамасский политехнический институт (филиал) НГТУ
им. Р.Е. Алексеева, г. Арзамас
Научный руководитель Волков Н.В., к.т.н., доцент
Аннотация.
В статье на основании анализа уравнений движения
динамически настраиваемого гироскопа в режиме датчика угловых скоростей
показано наличие паразитных перекрестных связей. Даны рекомендации для их
уменьшения.
Ключевые слова:
динамически настраиваемый гироскоп, датчик угловых
скоростей, роторный вибрационный трехстепенный гироскоп, перекрестная
связь.
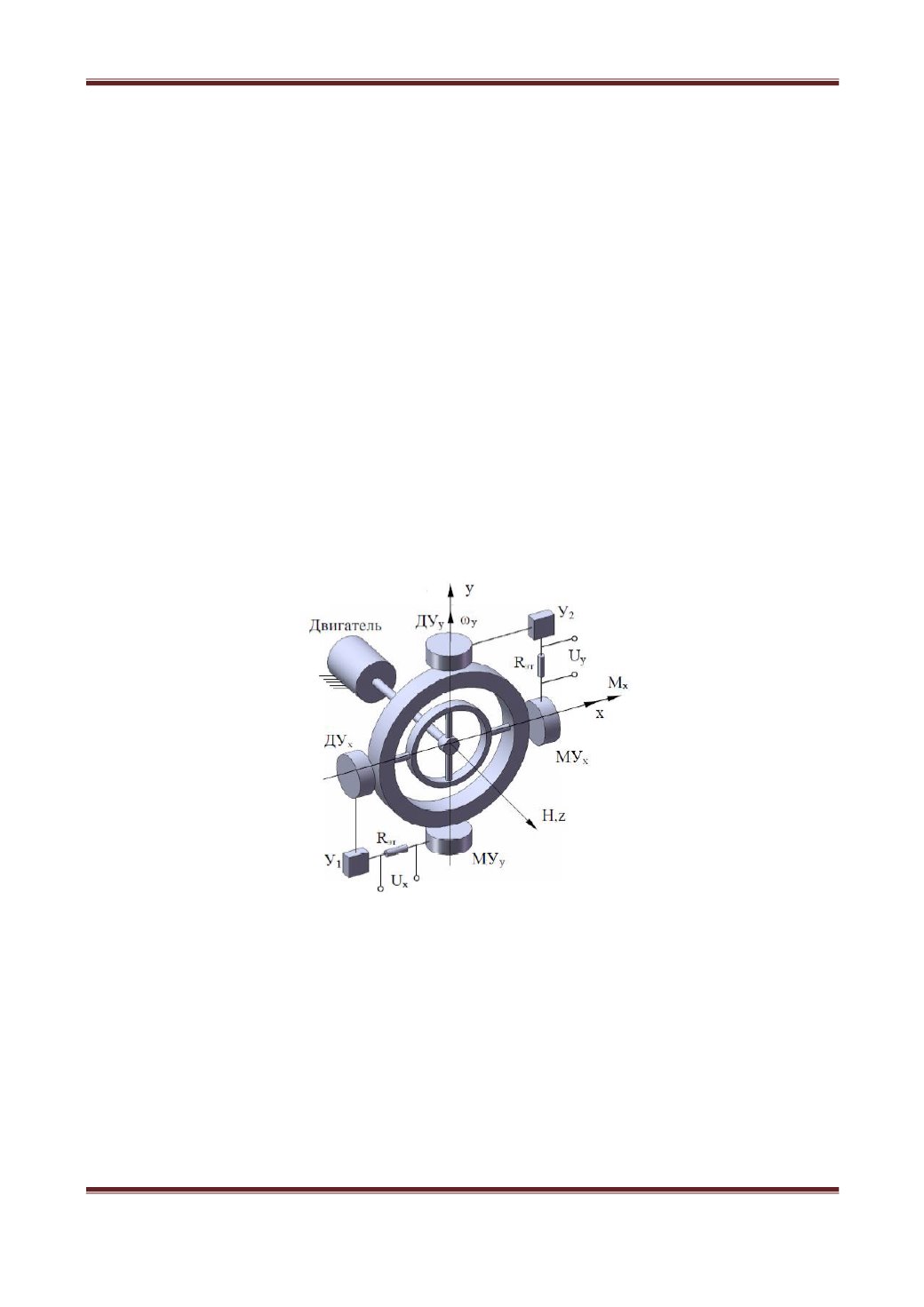
Динамически настраиваемый гироскоп (ДНГ) – это роторный
вибрационный трехстепенный гироскоп (Рис. 1) подвергнутый динамической
настройки.
ДУ – датчик угла, МУ – моментное устройство
Рис. 1. Динамически настраиваемый гироскоп в режиме датчика угловых скоростей
Динамическая настройка гироскопа придает ему свойства близкие к
астатическому гироскопу. Поэтому для его работы в режиме датчика угловых
скоростей (ДУС) обратная связь связывает перекрестные каналы. Например,
при вращении основания с угловой скоростью ωy моментное устройство МУx
создает момент Мx, вызывающий прецессию гироскопа вокруг оси y c угловой
скорость равной скорости вращения основания. Таким образом, падение
напряжения на резисторе Rэт оказывается пропорциональным угловой
скорости вращения основания:


