М а т е р и а л ы X I I В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
351
точности.
При
наличии
существенной
погрешности
возможно
комплексирование информации от других навигационных систем (СНС).
Такая многофакторная оценка на реальных устройствах является
дорогостоящей, длительной и технически сложной, поэтому проводят
моделирование, которое позволяет оценить точностные характеристики
изделия в лабораторных условиях, без использования дорогостоящего и
сложного оборудования.
Таким образом, одной из важнейших задач, наряду с задачей разработки
ИИБ, является создание комплекса имитационного моделирования (КИМ), с
помощью которого можно оценить различные параметры этих блоков. Данный
комплекс позволяет проверить работу блока при различных начальных
условиях, и может быть адаптирован под применение ИИБ на различных
подвижных объектах.
Были проанализированы типовые конструкции ИИБ из состава различных
БИНС, оценены характеристики инерциальных датчиков, определены их
достоинства и недостатки.
В проектируемом ИИБ предполагается использование компенсационных
акселерометров. А в качестве гироскопов предполагается использование
одноосного датчика угловых скоростей компенсационного типа, состоящий из
двух блоков: электронного модуля и чувствительного элемента на базе
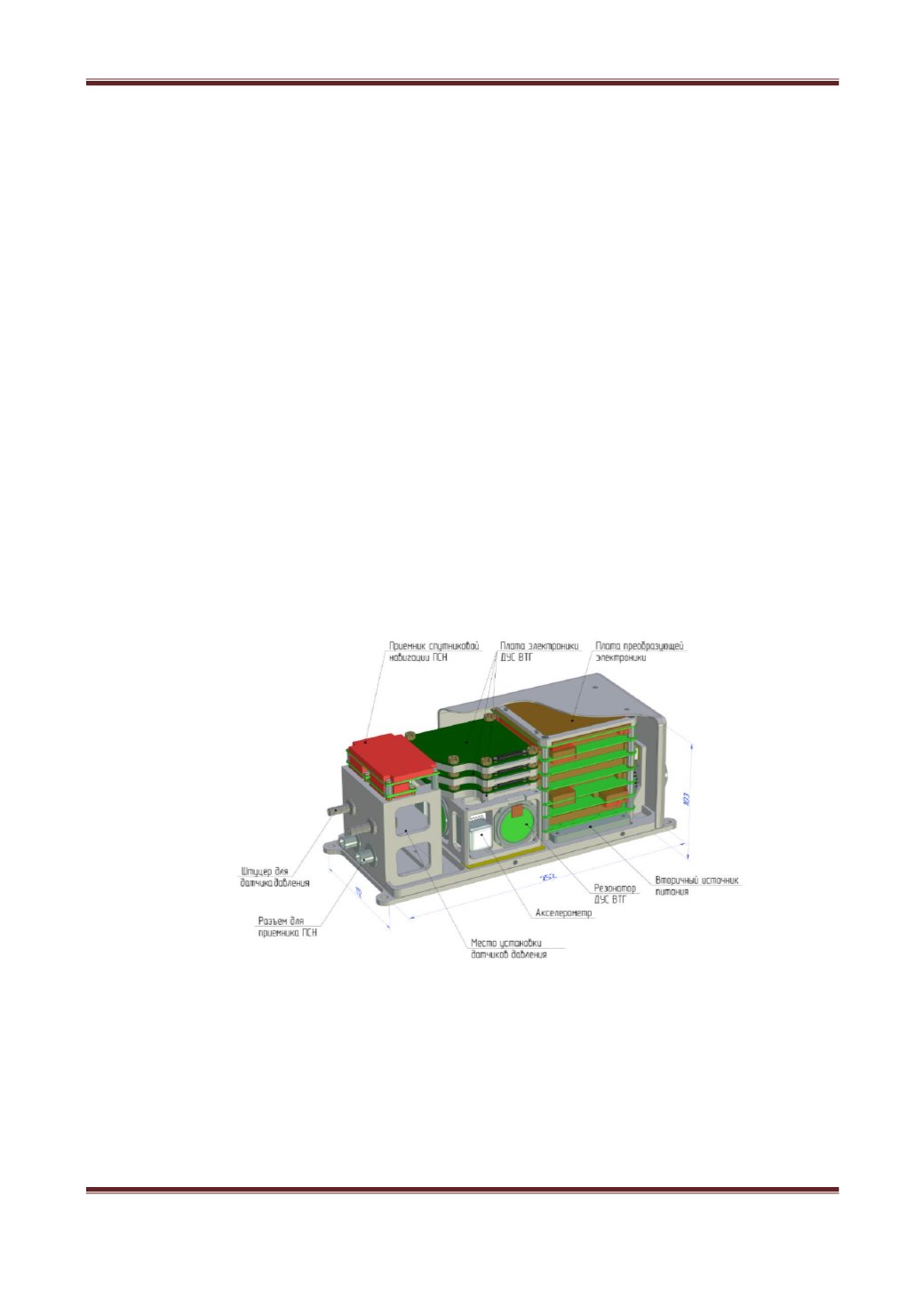
волнового твердотельного гироскопа. Инерциальный измерительный блок
представлен на рис. 1.
Рис. 1. Инерциальный измерительный блок
Для расширения функциональных возможностей и повышения точности
измерения ИИБ планируется оснастить приемником спутниковой информации
и датчиками давления. Это позволит измерять дополнительный параметры и
обеспечить комплексирование информации. Функциональная схема ИИБ
представлена на рис. 2.


