271
ГЛАВА 30. СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ
ПЕРЕВЕРНУТОГО МАЯТНИКА
30. 1. Постановка задачи
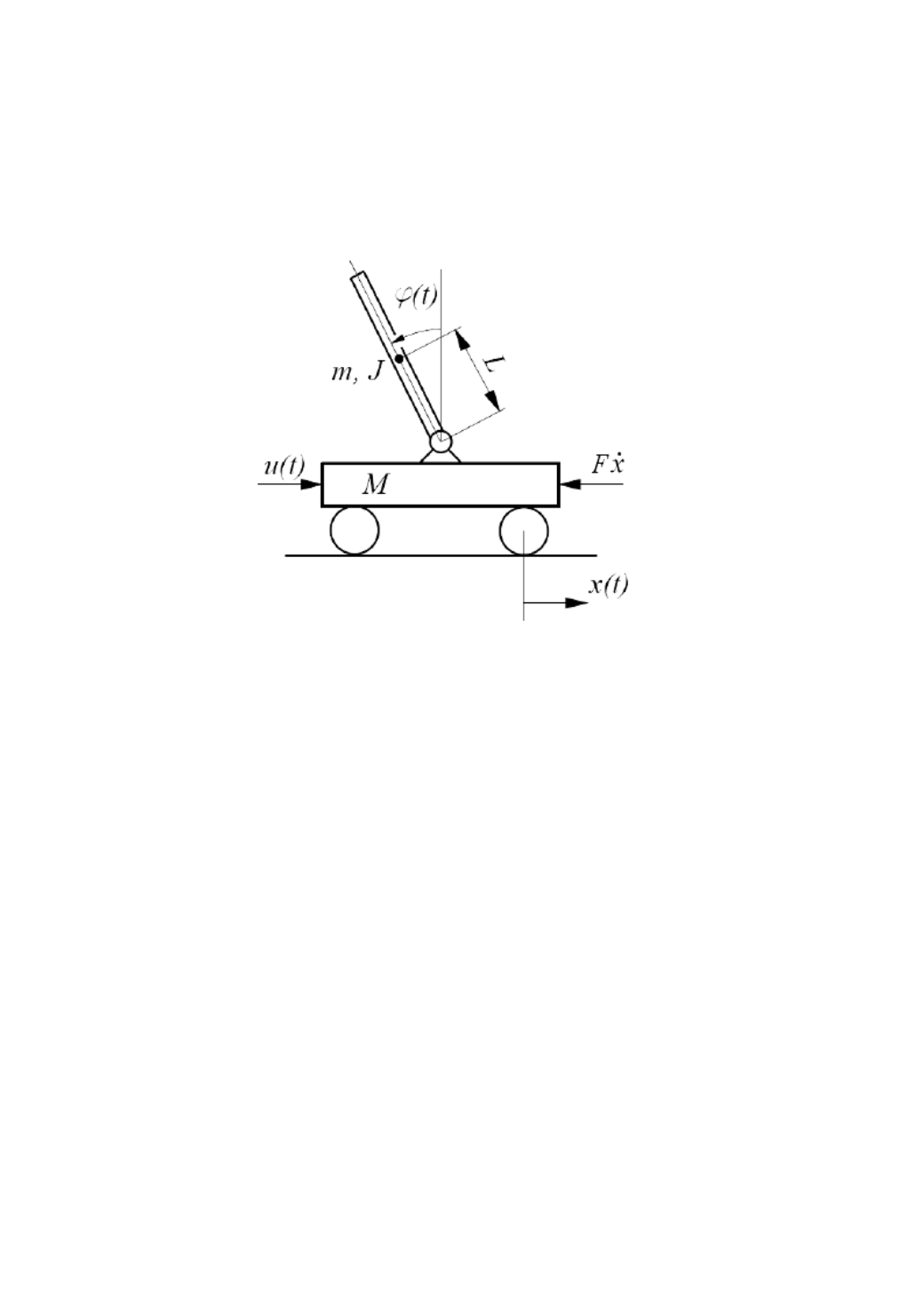
Рассмотрим перевернутый маятник, изображенный на рис. 30.1.
Рис. 30.1. Перевернутый маятник
Ось маятника монтируется на тележке, которая может перемещаться в
горизонтальном направлении. Тележка приводится в действие мотором,
который приводится в движение мотором, который в момент времени
t
прикладывает к тележке силу
( )
tu
.
При отсутствии каких-либо управляющих воздействий на тележку
маятник, находящийся в равновесии в начальный момент времени, в
последующий момент при малейших внешних возмущениях теряет равновесие.
Таким образом, данный объект управления является неустойчивым [17].
Задача состоит в создании и исследовании регулятора, поддерживающего
маятник в состоянии равновесия, в MATLAB и в Scilab.
30. 2. Математическая модель перевернутого маятника
Для
создания
системы
управления
необходимо
разработать
математическую модель объекта управления. При разработке математической
модели маятника будем использовать следующие обозначения для его
параметров:
M
– масса тележки;
m
– масса маятника;
F
– коэффициент вязкого трения при движении тележки;


