" Н а у к а м о л о д ы х " , 2 6 н о я б р я 2 0 1 9 г . , А р з а м а с
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
384
Автоматизированным навигационным комплексом (АНК) называет
совокупность конструктивно связанных между собой бортовых навигационных
средств, обеспечивающих решение навигационной задачи при совместном
использовании нескольких (бортовых, наземных) датчиков исходной
информации и автоматическом выполнении вычислительных и части
логических операций. В состав АНК входят следующие характерные группы
средств: датчики навигационной информации, навигационные вычислители,
устройства управления, вспомогательные устройства (блоки коммутации,
специальные источники электропитания и др.) [1]
Решением навигационной задачи является выработанный сигнал
отклонения самолета от заданной пространственно-временной траектории
(программы) полета и выбором алгоритма (метода) устранения отклонений с
определением регулируемых параметров.
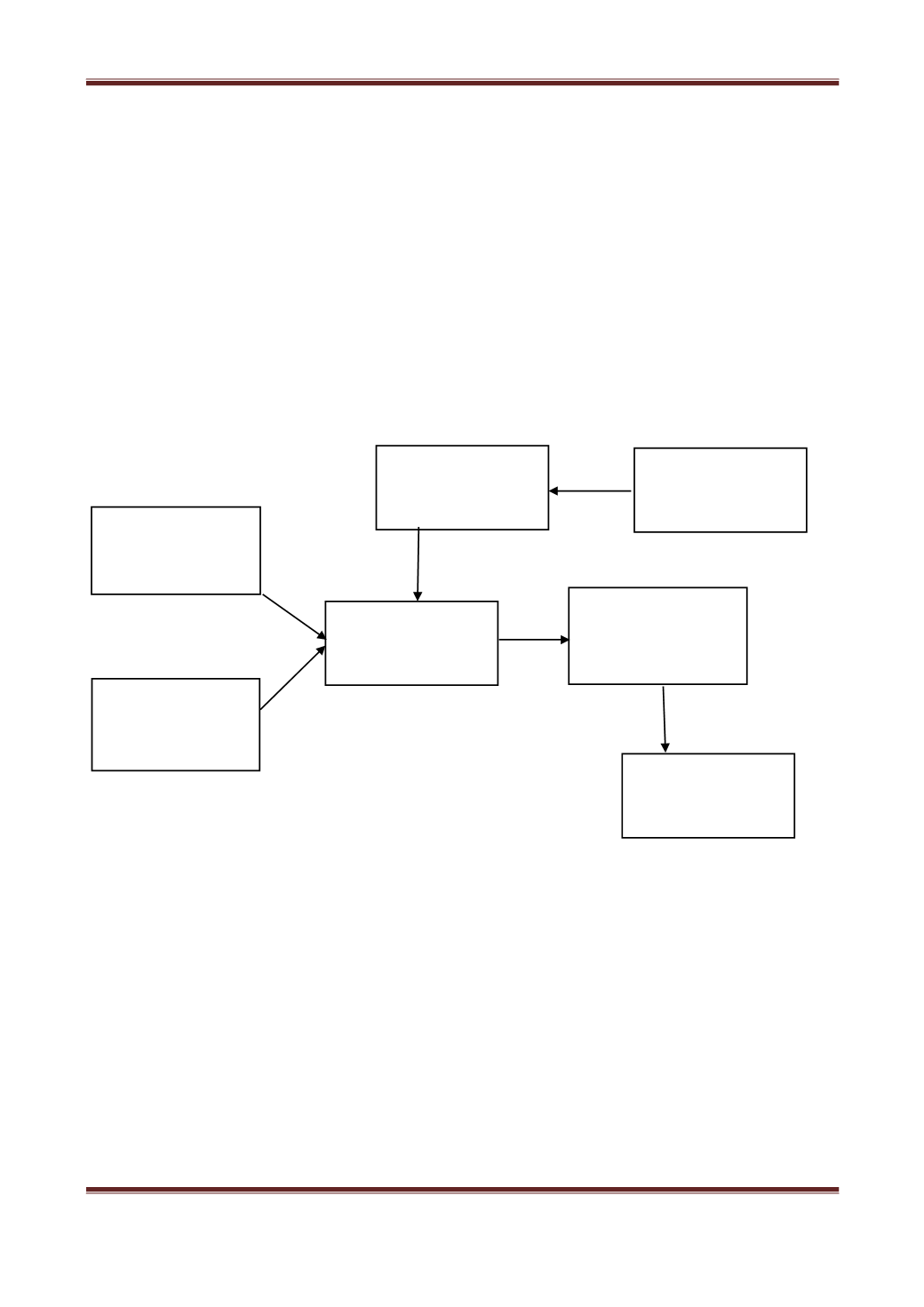
Рис. 1 Общая схема работы навигационной системы
Как видно из схемы, приведенной на рис.1, принцип решения
навигационной задачи складывается из следующих операций.
Перед полетом производится программирование, заключающееся в
формировании и вводе в память информации, характеризующей заданный
график движения.
В полете по данным датчиков ведется непрерывное счисление текущих
координат ЛА. Периодически производится определение координат
независимыми методами. Данные попадают на цифровой вычислитель,
который выполняет обработку и оптимизацию первичных измерений и выдает
сигналы управления ЛА на исполнительные механизмы.
Ввод исходных
данных
Счисление
координат
Оптимизация
(Коррекция)
Независимое
определение
координат
Выработка
навигационного
решения
Программирова
ние
Сигналы
управления ЛА


