М а т е р и а л ы X I I В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
385
При создании системы управления наш выбор пал на отечественные
микроконтроллеры 572ПА2А по причине их доступности и цены, а также
простоты программирования. Система управления имеет два режима: режим
полета и режим предстартового контроля. В данной статье мы рассматриваем
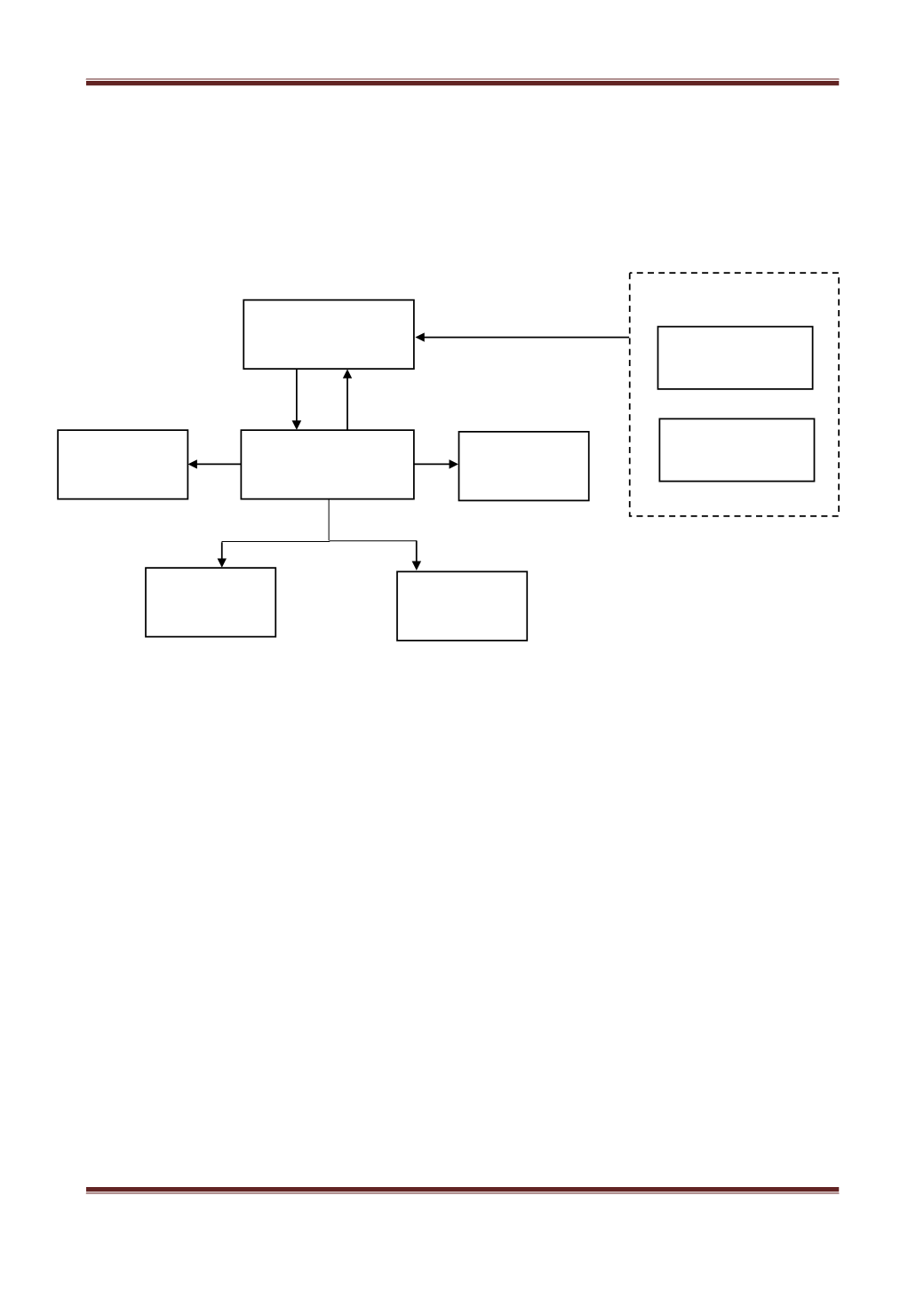
только управления в режиме полета. Блок-схема приведена на рис.2
Теперь рассмотрим назначение каждого элемента схемы.
Рис.2 Блок-схема системы управления
Модуль БЦВУ - это бортовое цифровое вычислительное устройство, мозг
всей системы. Выполняет выдачу цифровой информации в блок управления о
текущем положении БПЛА и значения желаемых углов поворота. Также
осуществляет выдачу команд в блок управления о смене режима [2].
Блок управления – это модуль обработки информации, полученной от
ведущего устройства, которым является БЦВУ. В режиме полета осуществляет
функции цифро-аналогового преобразования данных, полученных от БЦВМ в
аналоговый сигнал в виде напряжения, подающегося на сервоприводы.
Функцию пересчета цифрового сигнала в аналоговый выполняют
микроконтроллеры 572ПА2А. Микросхемы 572ПА2А представляют собой 12-
разрядный умножающий цифро-аналоговый преобразователь с функцией
записи и хранения двоичного кода. Предназначены для преобразования 12-
разрядного прямого двоичного кода на цифровых входах в ток на аналоговом
выходе, который пропорционален значениям кода и опорного напряжение.
Данный микроконтроллер обладает следующими особенностями:
Мощность потребления (макс.) 30 мВт
±10В – диапазон опорного напряжения
Время установления выходного тока (макс.) 10 мкс
БЦВУ
Блок управления
Сервопривод
Сервопривод
Сервопривод
Сервопривод
Датчик угла
Акселерометр
Блок датчиков


