" Н а у к а м о л о д ы х " , 2 6 н о я б р я 2 0 1 9 г . , А р з а м а с
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
386
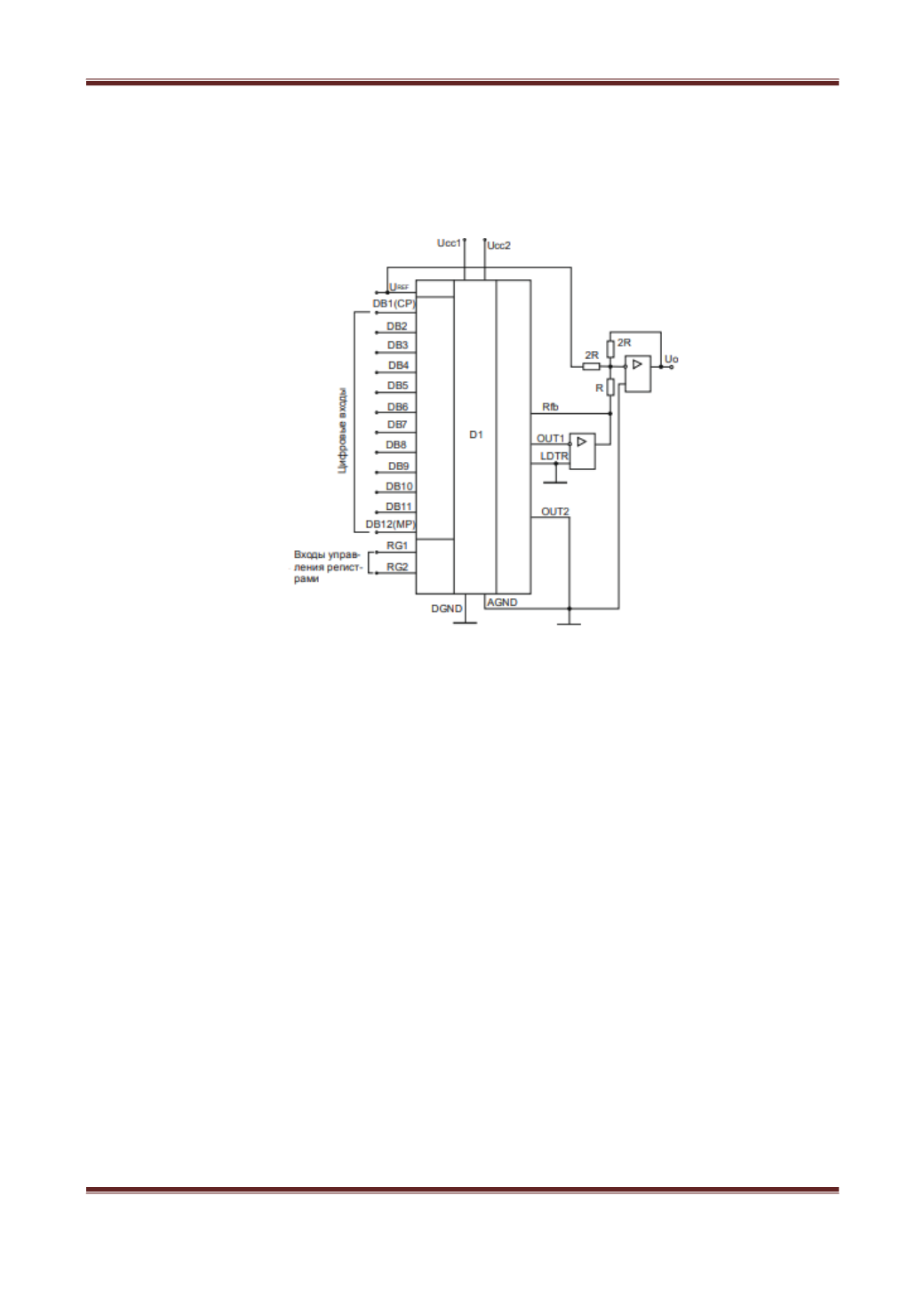
Два источника питания U
cc1
=5В±5% и U
cc2=
15В±5%
Два 12-разрядных буферных регистра
Данный микроконтроллер работает в режиме четырехквадратного
умножения с двумя внешними усилителями. Схема включения приведена на
рис.3.
Рис.3 Схема включения микроконтроллера 572ПА2А
Акселерометр, датчик угла являются инерциальными измерительными
устройствами. По последовательной шине данных передаются измерения о
текущем положении БПЛА.
Сервоприводами называют любые следящие приводы, т.е. такие, на
которые подается задание (обычно – желаемый угол поворота), а привод
самостоятельно отрабатывает это задание – поворачивается на заданный угол.
Подобное устройство элементов в представленной системе управления не
является универсальным для всех типов БПЛА.
В данной статье описана наиболее простая аппаратная часть системы
управления.
Литература
1.
Системы управления летательными аппарами (баллистическими ракетами
и их головными частями): Учебник для вузов/ Г.Н. Разоренов, Э.А.
Бахрамов, Ю.Ф. Титов; Под ред. Г.Н. Разоренова. М.: Машиностроение,
2003. 584с.
2.
Комплексное проектирование систем управления и контроля летательных
автоматов. – М.: Машиностроение, 1980. – 256 с.


