М а т е р и а л ы X I I В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
291
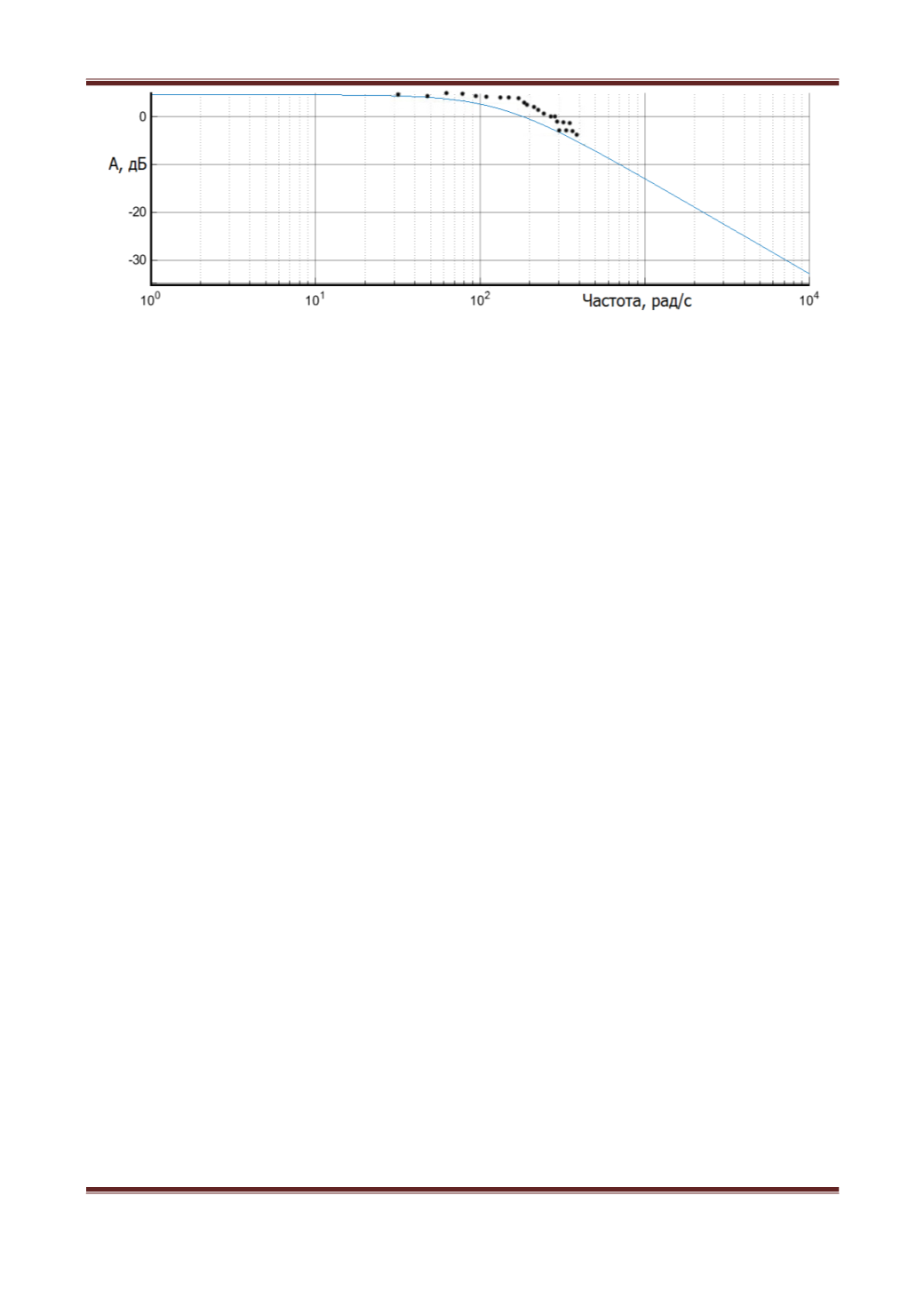
Рис. 3. ЛАЧХ
Как видно из рис. 3, точки на экспериментальной ЛАЧХ повторяют
теоретическую характеристику.
Таким образом, данный стенд пригоден для оценки динамических
параметров датчиков. Датчик, с которым проводились эксперименты,
соответствует динамическим характеристикам, указанным в его описании.
_____________________________________
1. Ишанин Г.Г., Мальцева Н.К., Рождественский А.В., Сычевский А.Т.,
Хребтова В.П. Источники и приѐмники излучения − Санкт-Петербург: СПбГУ
ИТМО, 2010. − 61 с.
ПОВЫШЕНИЕ ТОЧНОСТИ ИЗМЕРЕНИЯ УГЛОВОГО УСКОРЕНИЯ
Е.В. Борьков
студент, Арзамасский политехнический институт (филиал) НГТУ
им. Р.Е.Алексеева, г. Арзамас
Научный руководитель Обухов В.И., к.т.н., доцент
Аннотация. В статье описана конструкция сенсора для измерения
угловых ускорений подвижного объекта. Сенсор обладает высокой
чувствительностью к угловым и нечувствительностью к линейным ускорениям
и угловой скорости. В статье приведено теоретическое и экспериментальное
обоснование эффективности статической и динамической балансировки.
Ключевые слова: сенсор, угловое и линейное ускорение, балансировка,
центр масса, момент инерции.
В классической теории управления подвижными объектами для
определения их пространственного положения используется сигнал с триады
измерителей линейных ускорений и триады измерителей угловых скоростей. В
некоторых случаях этой информации недостаточно. Для определения
пространственного положения и управления высоко динамичными объектами
необходимо знать его угловое ускорение.


