М а т е р и а л ы X I I В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
295
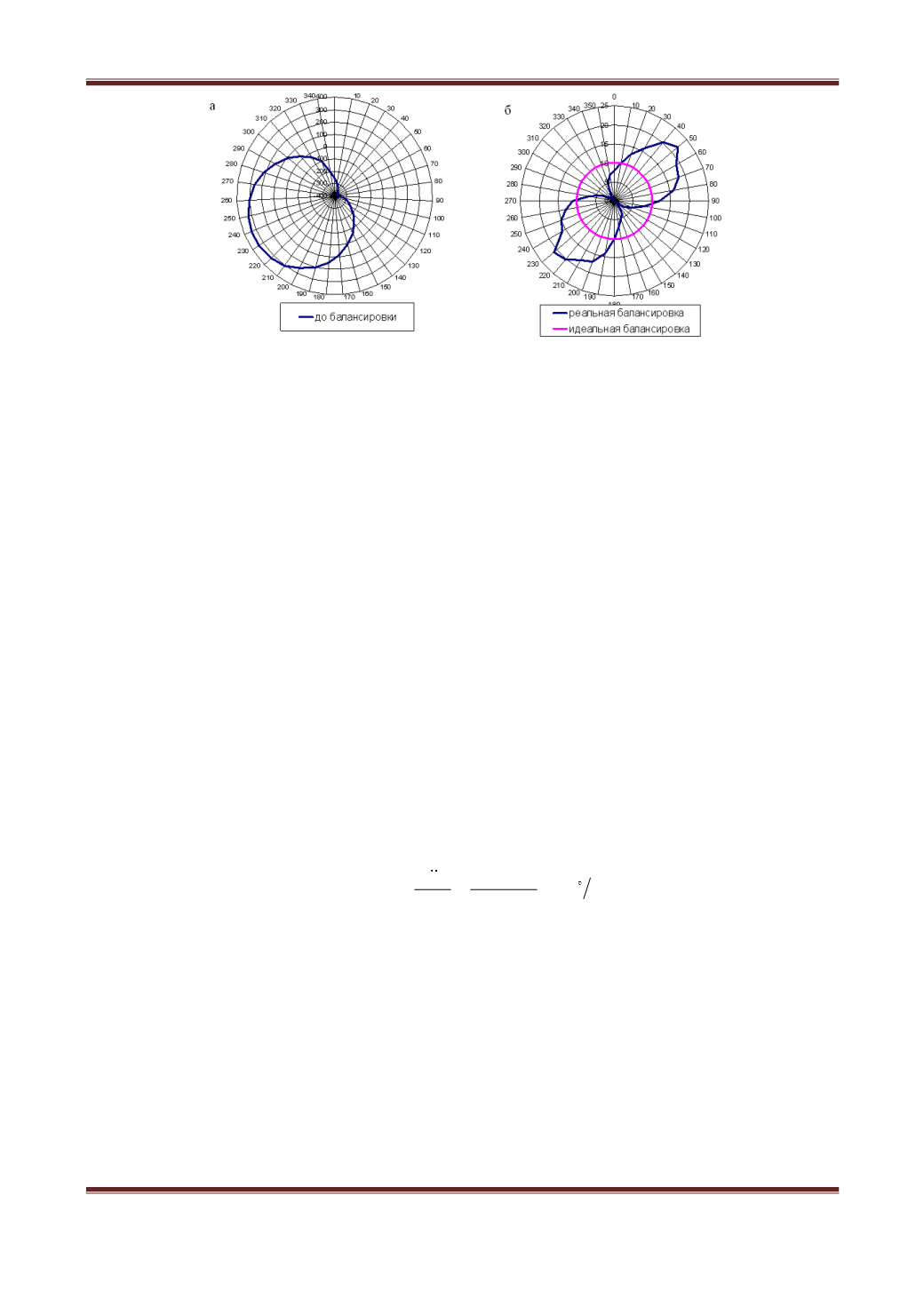
Рис. 5. Диаграмма датчика до и после балансировки:
а – до балансировки; б – после балансировки
При правильной балансировке выходное напряжение измерителя угловых
ускорений в каждом положении относительно вектора g должно быть нулевым.
Графически нулевой сигнал должен описывать окружность, радиус которой
равен нулевому сигналу датчика. Графики балансировки измерителя угловых
ускорений показаны на рис. 5, б.
Кривая диаграммы сбалансированной системы представляет собой петлю.
Максимальная амплитуда отклонения в 100 раз ниже, чем у несбалансированной
системы. Физически это связано не с разбалансировкой маятника, а наличием
плоскопараллельного движения. Плоскопараллельное движение изменяет
крутизну преобразования ѐмкостного датчика угла. В результате диаграмма
имеет форму симметричной петли относительно начального нулевого сигнала.
Экспериментально доказано, что погрешность от действия линейного ускорения
не превышает 0,8%.
Второй составляющей итоговой погрешности измерителя угловых
ускорений является погрешность, вносимая действием угловой скорости. При
диапазоне измерения углового ускорения 600 °/с
2
в диапазоне частот 1-10 Гц
действующая на сенсор максимальная угловая скорость равна:
600
95
2 2 3,14 1
c
f
.
В результате теоретических расчетов и оценки результатов
экспериментальной
балансировки
установлено,
что
динамическую
балансировку при данном диапазоне измерения производить не требуется,
поскольку при максимальном динамическом небалансе погрешность составляет
менее 0,6%.
_______________________________________
1. Вавилов В.Д. Интегральные датчики / В.Д. Вавилов. – Н.Новгород.:
НГТУ, 2003. - 503 с.


