М а т е р и а л ы X I I В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
293
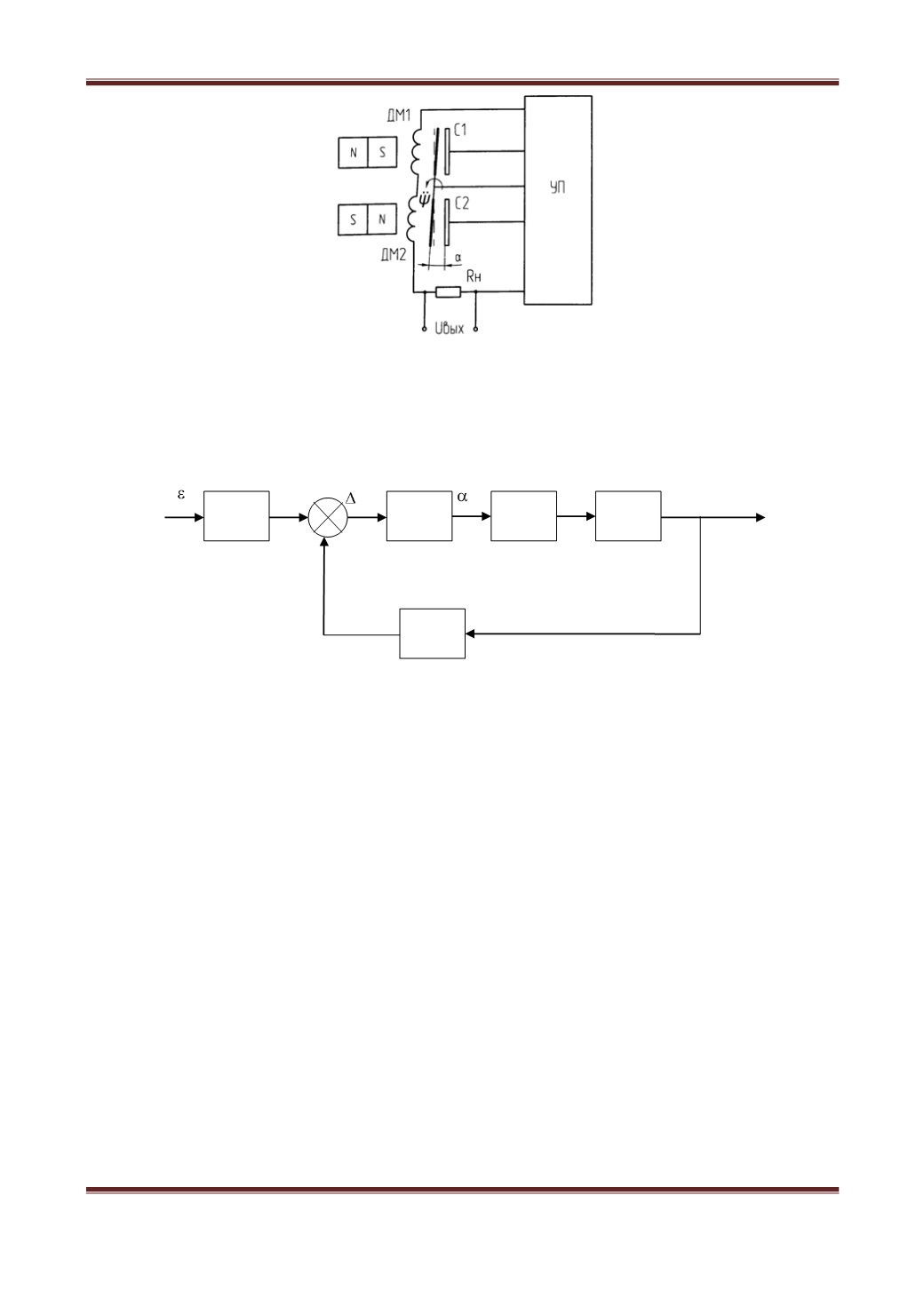
Рис. 2. Электрокинетическая схема датчика
С точки зрения теории автоматического управления датчик является
классическим преобразователем с электрической обратной связью.
Функциональная схема датчика показана на рис. 3.
Рис. 3. Функциональная схема датчика угловых ускорений
Для функциональной схемы:
ЧЭ – чувствительный элемент, ПУ – подвижный узел, ДП – датчик
перемещений (датчик угла), У – усилитель, ДМ – датчик момента,
–
измеряемое угловое ускорение,
М
– инерционный момент,
М
ос
– момент
обратной связи,
– угол отклонения маятника от нейтрали,
U
дп
– выходное
напряжение датчика угла,
U
вых
– выходное электрическое напряжение.
Приведенная выше конструкция обладает хорошей чувствительностью к
угловому ускорению. Данная конструкция также обладает чувствительностью к
линейному ускорению и угловой скорости. Чувствительность к линейному
ускорению обусловлена разбалансировкой маятника относительно оси качания,
это вызвано несимметричностью сборки, технологической погрешностью при
изготовлении элементов, наличием локальных дефектов на маятнике.
Чувствительность к угловой скорости вызвана разбалансировкой системы
относительно центрального момента инерции.
В классической теории гироскопов существует понятие статической и
динамической балансировки. Статическая балансировка заключается в сведении
центра тяжести и оси вращения. Динамическая балансировка – сведение
моментов инерции относительно оси вращения.
-
М
ЧЭ
ПУ
ДП
У
ДМ
М
ос
U
вых
U
дп
M


