258
Матрица
K
должна быть выбрана так, чтобы собственные значения
KC A
−
имели отрицательные действительные части.
Дискретный наблюдатель получается дискретизацией соответствующего
непрерывного.
Начнем рассмотрение с матриц с фиксированными размерами и со
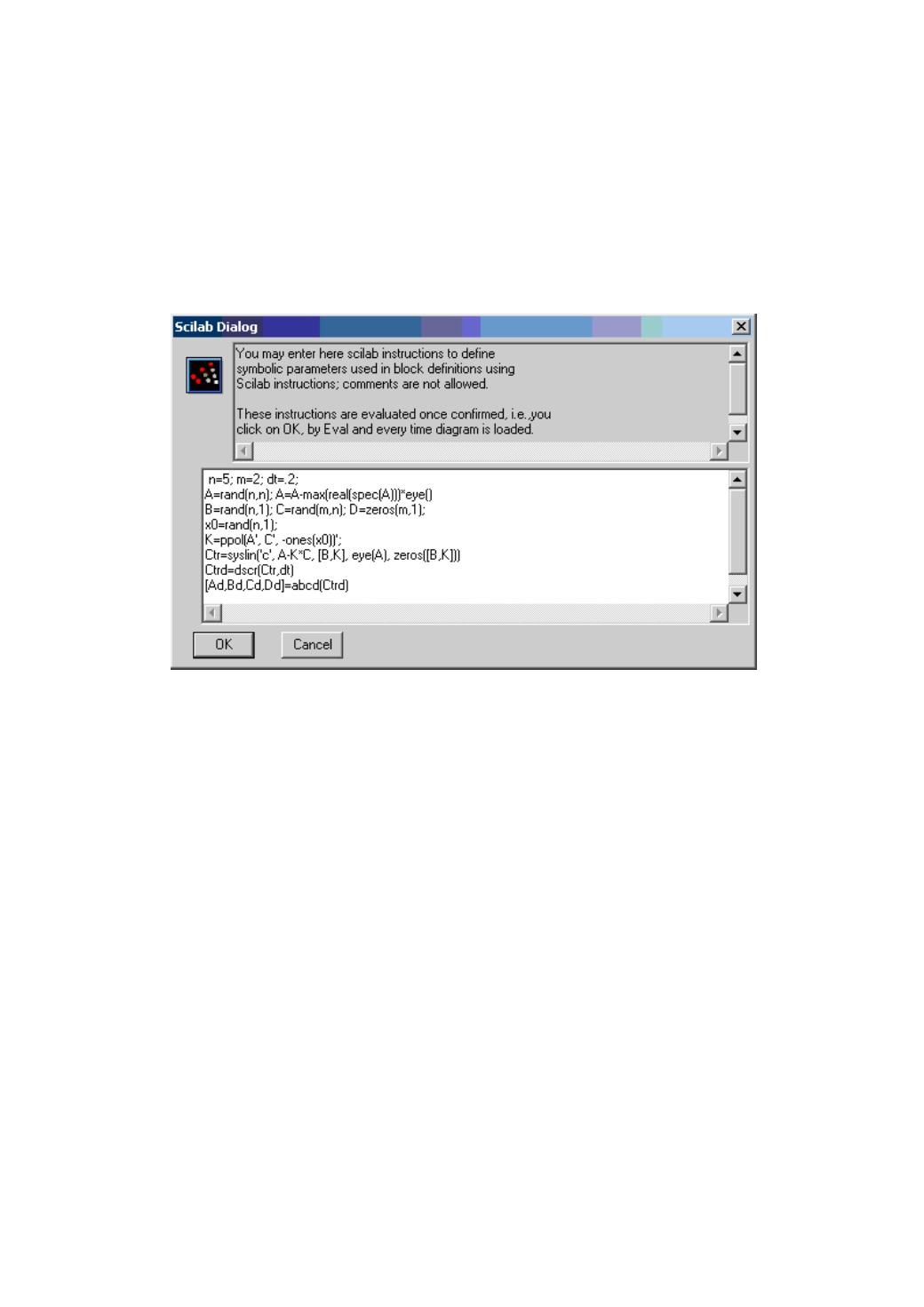
случайными элементами (рис. 29.1).
Скрипт с исходными данными помещен в контекст, который вызывается
командой
Context
→
Edit.
Рис. 29.1. Скрипт со случайными матрицами
Изначально матрица
А
задается случайным образом, но далее она
изменена таким образом, чтобы избежать экспоненциальной нестабильности
системы.
С помощью функции расположения полюсов
ppol
был получен
матричный коэффициент
K
наблюдателя.
Команда
syslin
определяет линейную систему.
Синтаксис
[sl]=syslin(dom, A, B, C [,D [,x0]])
либо
[sl]=syslin(dom,N,D)
либо
[sl]=syslin(dom,H)
Параметры
dom
– символьная переменная, принимающая значение ’c’ и ’d’, или [],
или скаляр. Она определяет временной домен системы и может принимать
следующие значения:
dom =
’
c
’ – для систем непрерывных во времени;


