" Н а у к а м о л о д ы х " , 3 0 - 3 1 м а р т а 2 0 1 7 г . , А р з а м а с
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
508
- погрешность датчика угловой скорости (ДУС);
- погрешность обеспечения постоянной скорости вращения платформы
гиростабилизатора
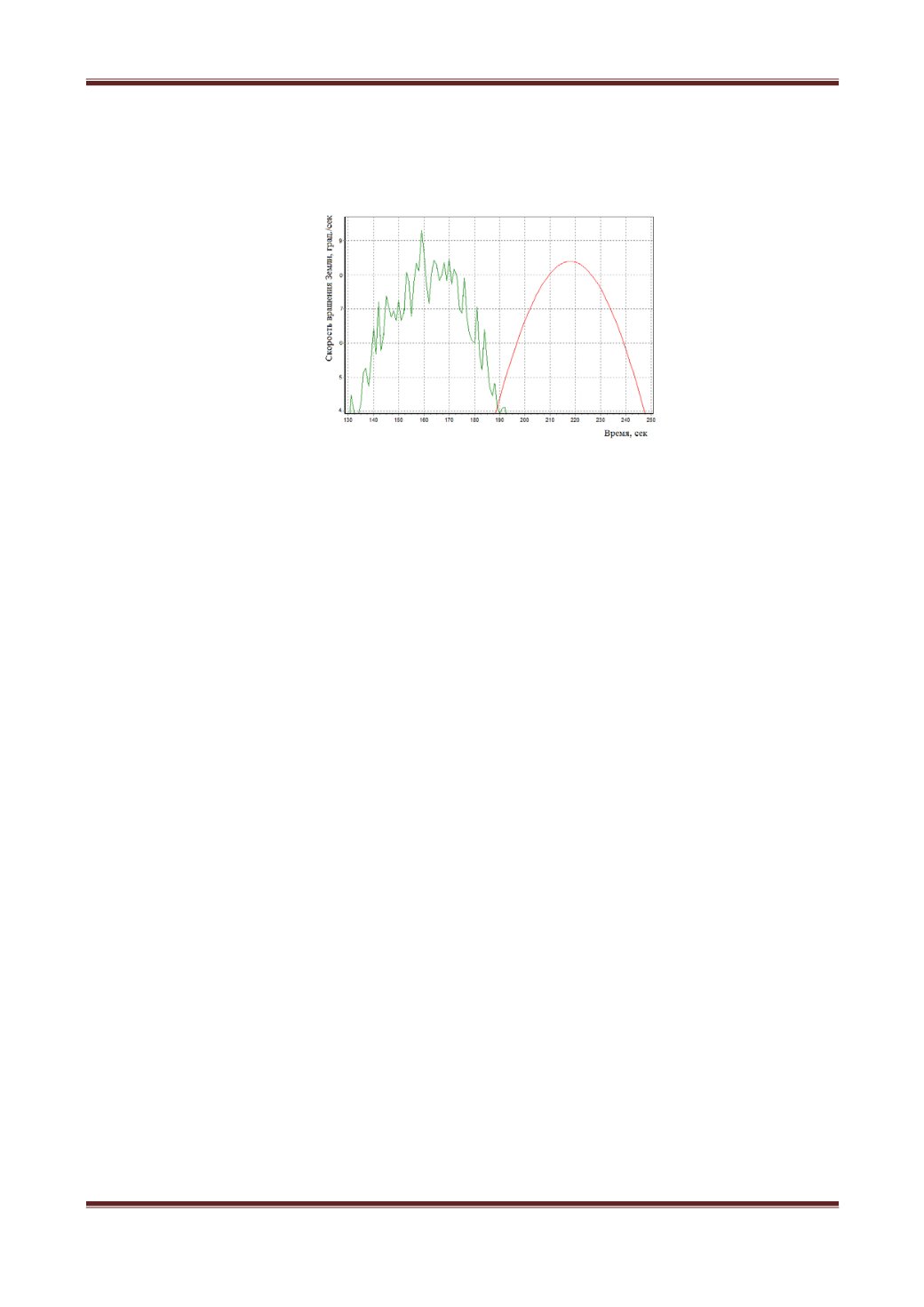
Рис. 2. Сравнение сигнала ДУС с идеальной синусоидой
На графике воздействие этих факторов можно заметить по «рубцам», что
вносят погрешность в определение скорости вращения Земли, а следовательно
снижает точность определения азимута. На данный момент предлагается
несколько технических аппаратных решений этой проблемы, среди которых
отказ от определения азимута с помощью ДУС в пользу спутникового
определения; использование специального оптического ориентатора, и другие.
Однако, существуют и программные способы решения проблемы.
Поступаемый с ДУС сигнал можно подвергнуть фильтрации, тем самым
смягчив помехи, увеличить точность определения азимута.
Одним из самых успешных методов оценивания состояния динамических
систем по праву считается фильтр Калмана. Этот метод получил широкое
распространение в практике статистической обработки траекторных измерений.
Такая популярность объясняется тем, что его алгоритм фильтрации имеет
рекуррентную форму, удобную для реализации на ЭВМ, обеспечивая
определение оценок с минимальными дисперсиями среди всех линейных
оценок.
Однако, в рамках данного фильтра вычисление оценки выполняется с
опорой на предыдущее значение, и в случае появления в выборке аномального
значения, фильтр её учитывает, что к приводит к накоплению ошибки (Рис.3).
В связи с вышесказанным, наиболее подходящим (в условиях действия
выбросов) является способ робастного оценивания параметров траекторных
измерений.


