М а т е р и а л ы X В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
507
- начальная азимутальная ориентация;
- автономная работа;
На первом этапе на основе полученного значения скорости вращения
Земли производится расчёт положения платформы относительно земной
системы координат и вычисляется матрица ориентации. Значения этой матрицы
используются системой в качестве начальных условий второго этапа -
определения траектории скважины.
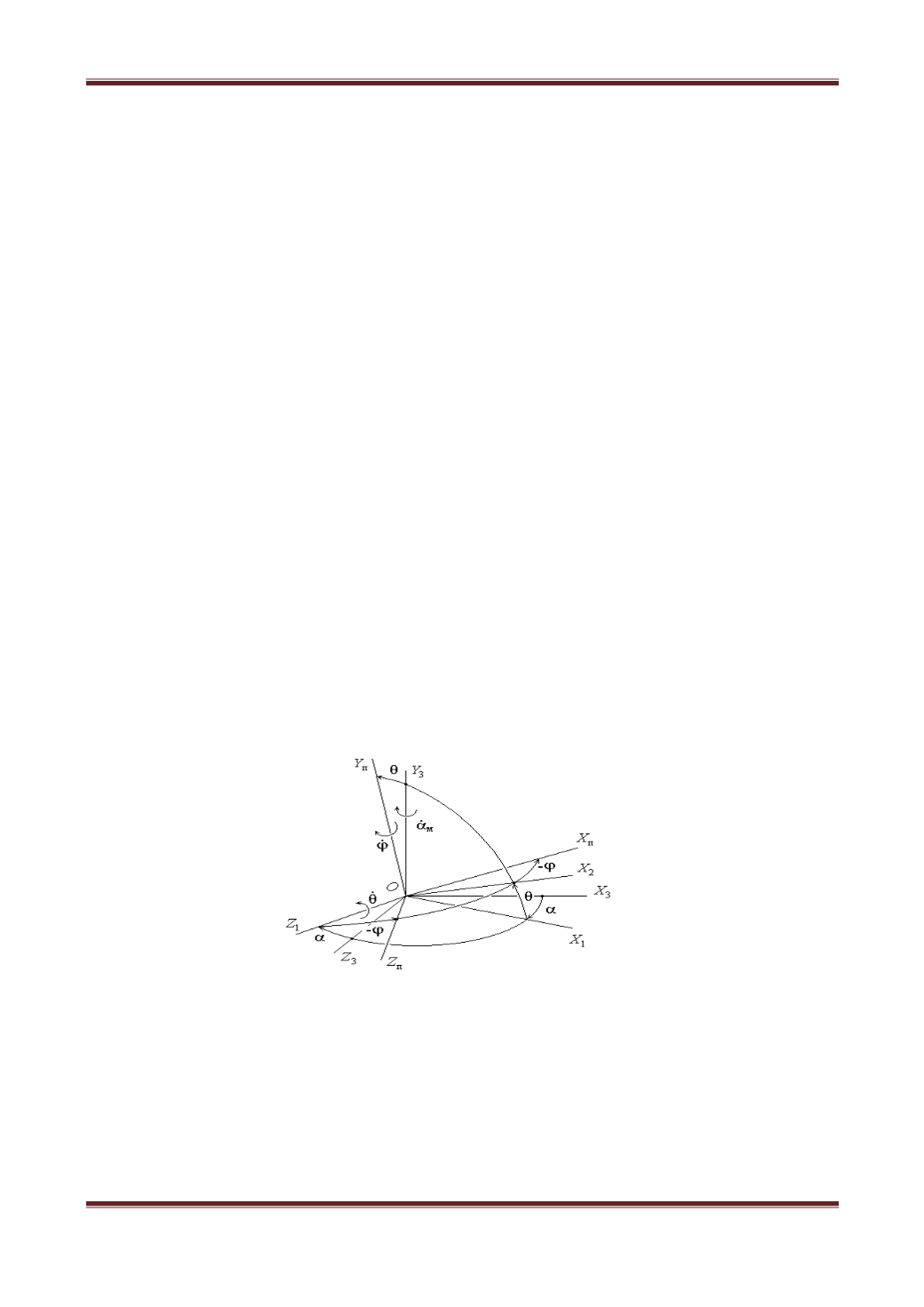
Ориентация приборной системы координат относительно земной
определяется матрицей ориентации
пз
А
(матрицей направляющих косинусов)
общего вида, связанной с углами
α
,
θ
,
ϕ
следующим образом:
α ⋅ϕ +
+α ⋅θ ⋅ϕ −
θ ⋅ϕ −
α ⋅ϕ −
−α ⋅θ ⋅ϕ −
α ⋅θ −
θ
α ⋅θ −
α ⋅ϕ +
+α ⋅θ ⋅ϕ
θ ⋅ϕ
α ⋅ϕ −
−α ⋅θ ⋅ϕ
=
cos
cos
sin
cos
sin
sin
sin
sin
cos
cos
cos
sin
sin
sin
cos
cos
sin
cos
sin
sin
cos
cos
sin
cos
sin
sin
cos
cos
cos
пз
А
,
где
α
- азимут;
θ
- зенитный угол;
ϕ
- угол поворота платформы.
Основной негативный фактор, влияющий на точность построения
траектории скважины – погрешность определения азимутального направления.
Существуют два главных фактора, приводящих к ошибке азимута:
- курсовой уход (дрейф азимута) на этапе автономной работы;
- ошибка начальной азимутальной ориентации.
Согласно исследованиям, основную часть погрешности по азимуту
вносит ошибка начальной ориентации. Составляют эту ошибку несколько
факторов, среди которых можно выделить два основных:
Рис. 1. - Ориентация приборной системы координат
относительно географической системы


