" Н а у к а м о л о д ы х " , 2 6 н о я б р я 2 0 1 9 г . , А р з а м а с
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
314
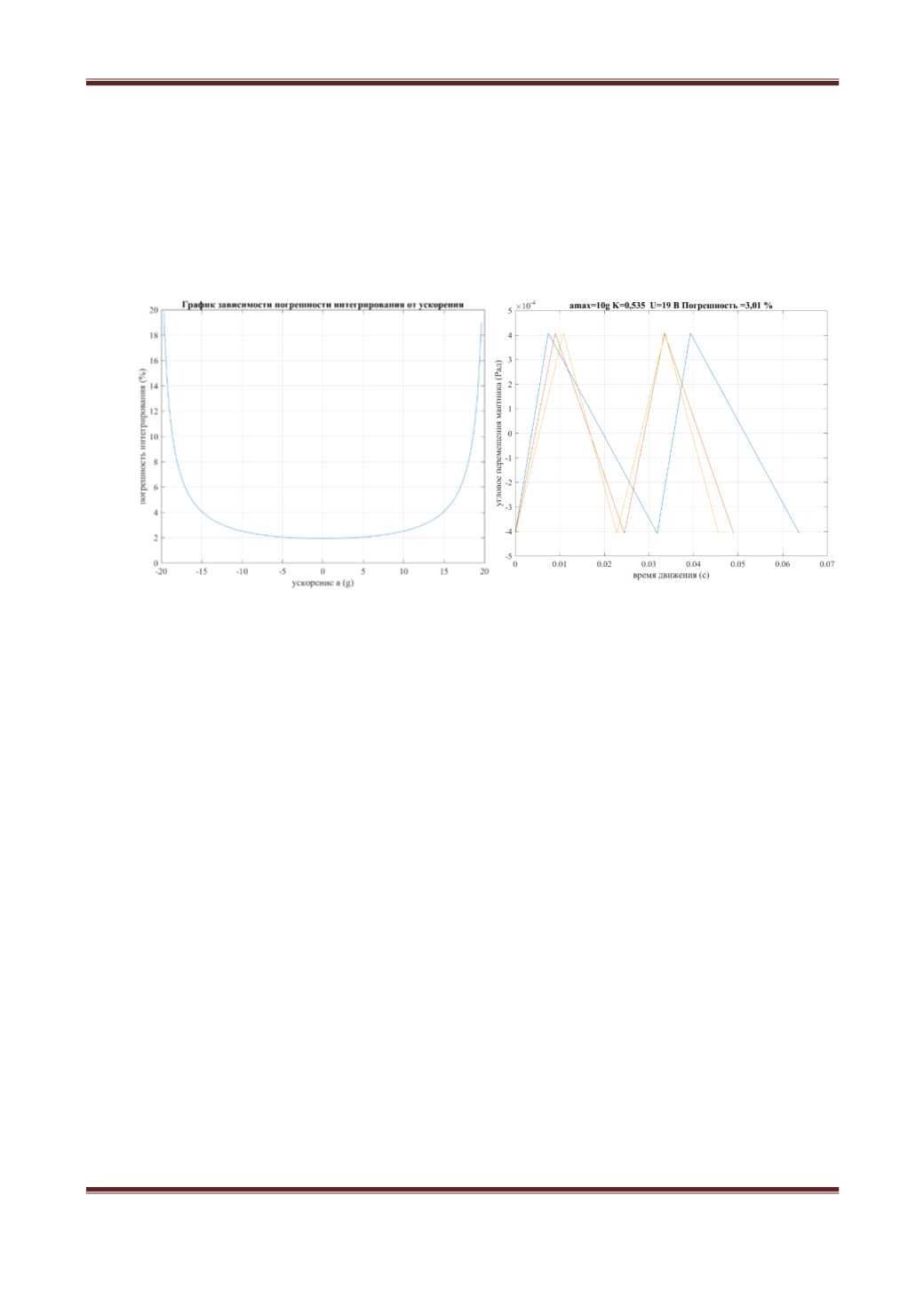
0%, что свидетельствует о том, что при данном методе измерения невозможно
разработать акселерометр навигационного класса, с погрешностью измерения
не более сотых долей процента. Исходя из этого, можно разработать серию
акселерометров пилотажного класса с погрешностью до 5%. Погрешность
интегрирования последующих акселерометров оценивается при максимальном
ускорении, т.к. один цикл измерения при максимальном ускорении включает в
себя самый короткий и самый длинный временные участки, и чем больше
временной участок, тем больше погрешность интегрирования на нем.
а) б)
Рис. 4. а - график зависимости погрешности интегрирования от ускорения; б - график
движения маятника при
K
=0.535 и
a
max
=10 g.
Смоделируем акселерометр с диапазоном измеряемых ускорений ±10g,
удовлетворительной погрешностью и напряжением питания, не превышающим
напряжение пробоя электростатического преобразователя (21,39 В).
Модифицируем данный акселерометр путем изменения напряжения питания;
как вариант, получим целочисленное напряжение питания, равное 19 В, также
при этом немного понизится погрешность интегрирования (до 3,01%). График
движения маятника смоделированного акселерометра показан на рис. 4-б.
Отрезки времени движения подвижного узла акселерометра условно вправо и
влево при измерении ускорения соответственно равны 0,0074 с и 0,0245 с.
Заключение
Получена математическая модель метода измерения, установлены
пределы интервалов времени интегрирования для получения приемлемой
погрешности. Смоделирован акселерометр на диапазон входного ускорения
±10g с демпфированием ПУ в среде азота.
Главным недостатком подобных акселерометров являются высокие
требования к стабильности источника питания. Требования на источник
питания можно снизить, установив вольтметр, сообщающий микроконтроллеру
информацию о текущем напряжении на электростатическом преобразователе


