" Н а у к а м о л о д ы х " , 2 6 н о я б р я 2 0 1 9 г . , А р з а м а с
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
310
напряжениями на двух компараторах (или программно на МП). При этом под
действием разности (суммы) моментов, создаваемых электростатическими
актюаторами, и инерционным моментом от измеряемого ускорения, маятник
совершает колебательное движение. В настоящей работе предполагается
организовать циклическое движение акселерометра от одной до другой крайней
точки
путем
микропроцессорного
управления
электростатическим
преобразователем с двумя силовыми электродами. Вторая задача
микропроцессора – отсчет времени прохождения, вычисление ускорения и
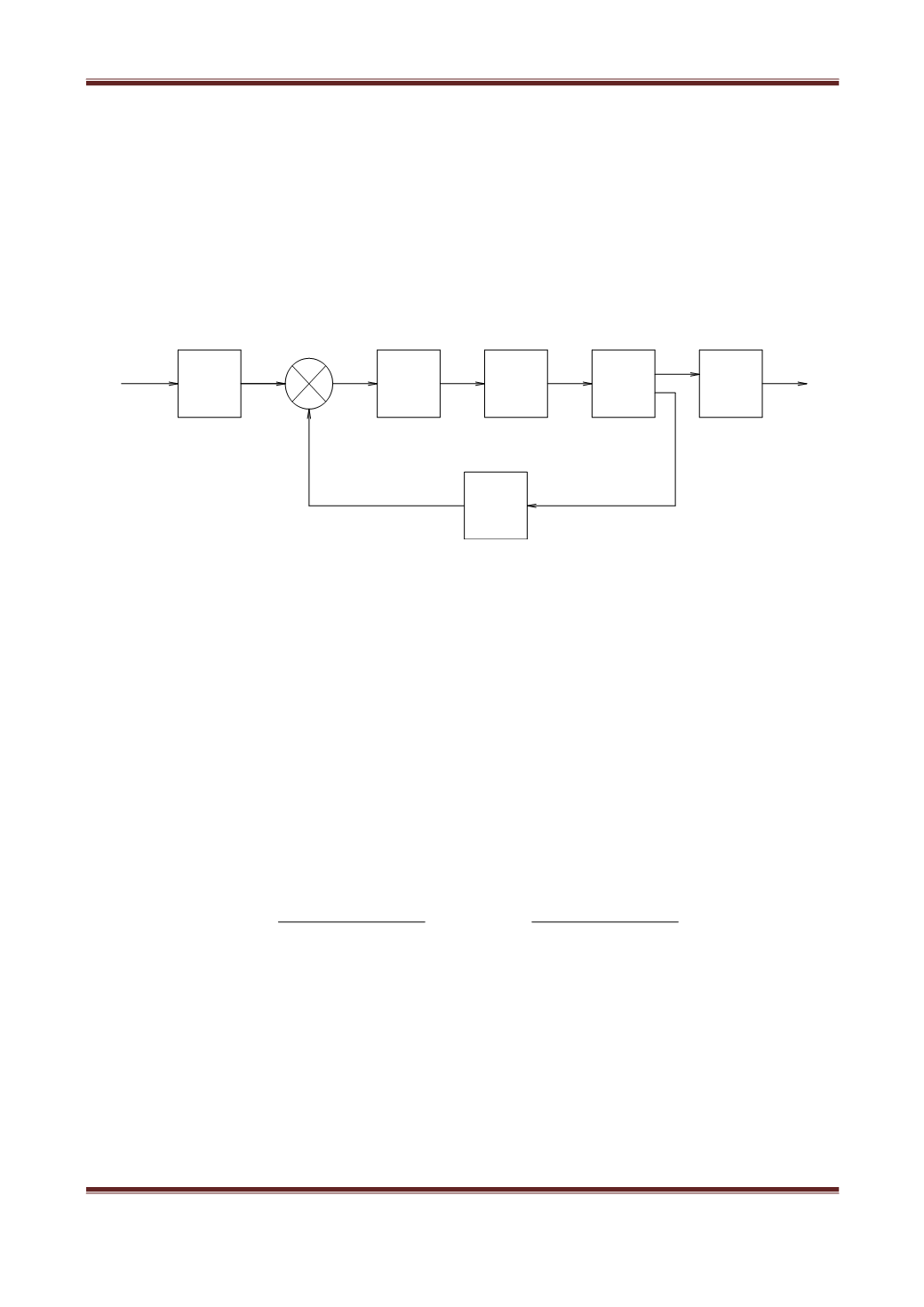
вывод выходного значения в виде кода. Функциональная схема устройства
представлена на рис. 1.
Рис. 1. Функциональная схема:
а
– входное ускорение; ЧЭ – чувствительный элемент;
M
и
–
инерционный момент;
M
э
–момент электростатического преобразователя;
ΣM
i
- сумма
моментов, действующих на подвижный узел; ПУ – подвижный узел;
Q
– угловое
перемещение; ПР – преобразователь перемещения; U – напряжение с измерительной емкости
преобразователя перемещений; АЦП – цифро-аналоговый преобразователь; МП –
микропроцессор;
t
1
,
t
2
– отрезки времени движения маятника; ЭСП –электростатический
преобразователь; код – выходной код
Математическая модель подвижного узла акселерометра базируется на
модели акселерометра с частотным выходом [1, 3]; при этом необходимо
дополнить данную модель уравнением преобразования акселерометра.
Поскольку подвижный узел при определенных условиях работы
интерпретируется как механический интегратор, уравнения движения (условно
вправо и влево на рис. 2) под действием суммы моментов подвижного узла
представляют собой интегралы:
1
21
1
0
2
2
t
t
t
d
пр
и
э
d
пр
и
э
,dt
K
MMM
Q;dt
K
MMM
Q
где
Q
– угловое перемещение относительно состояния покоя ПУ;
M
э
– момент,
создаваемый электростатическим преобразователем;
M
и
– инерционный момент;
t
1
– время движения маятника в одну сторону (вправо);
t
2
– время движения
маятника в другую сторону (влево);
K
d
– коэффициент демпфирования ПУ;
M
пр
– момент, создаваемый преобразователем перемещений.
При допущении, что момент, создаваемый преобразователем
перемещений, ввиду своей формы, времени действия и величины напряжения
питания имеет очень малое значение по сравнению с суммой-разностью
момента инерции и момента электростатического преобразователя, имеем:
а
ЧЭ
M
и
ПУ ПР
АЦП
МП
МП
ЭСП
код
t
1,
t
2
Q
±М
э
U
ΣM
i


