М а т е р и а л ы X I I В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
327
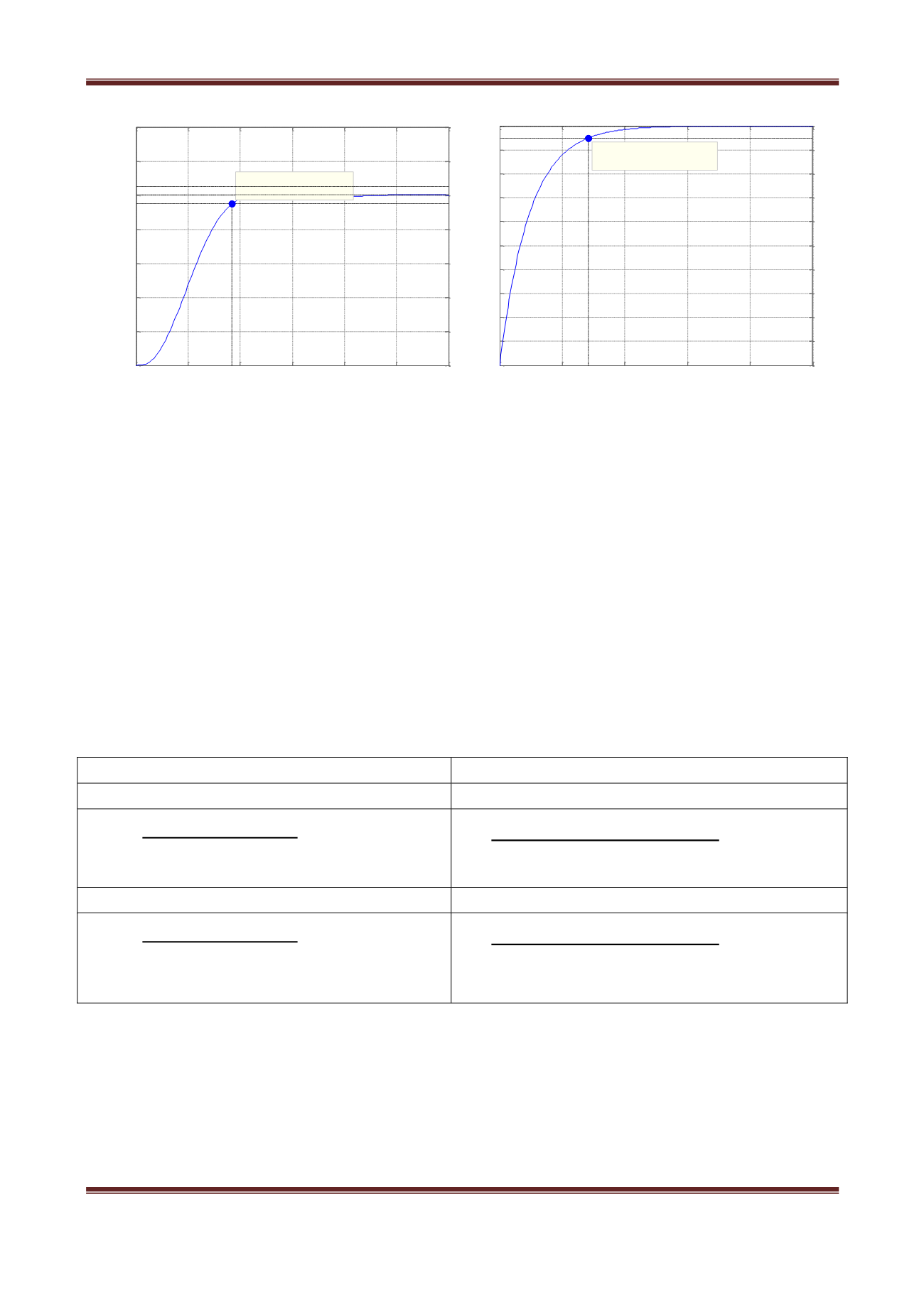
a)-
график с оптимальным ПИД-
регулятором с изменением массы на -
10%
b)-
график с робастным ПИД-
регулятором с изменением массы на -10%
Рис. 4. Графики сравнения оптимального и робастного ПИД-регуляторов
Анализируя полученные результаты можно сделать вывод, что
перерегулирование в обоих случаях практически не меняется. Также следует
отметить разный характер переходных процессов. В случае с робастным ПИД-
регулятором переходный процесс обладает слабой колебательностью. При
использовании
оптимального
ПИД-регулятора
переходный
процесс
экспоненциальный.
Сравним изменение времени переходного процесса, приведенное в
таблице.
Робастный ПИД-регулятор
Оптимальный ПИД-регулятор
+10%
+10%
.
.
-10%
-10%
.
Полученные данные показывают эффективность робастного ПИД-
регулятора. Выходной параметр (время переходного процесса) в меньших
пределах изменяется по сравнению с системой с оптимальным ПИД -
регулятором, т.е. система стала менее чувствительной к изменению массо-
габаритных показателей чувствительного элемента. Также отметим методику
(основные позиции) синтеза робастного ПИД -регулятора:
Step Response
Time (seconds)
Amplitude
0
0.02
0.04
0.06
0.08
0.1
0.12
0
0.2
0.4
0.6
0.8
1
1.2
1.4
System: Wzam1
Settling time (seconds): 0.0369
Step Response
Time (seconds)
Amplitude
0
0.5
1
1.5
2
2.5
x 10
-5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
System: Wzam2
Settling time (seconds): 7.08e-06


