М а т е р и а л ы X I I В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
325
температура), возникали немалые затруднения. Также технологический процесс
травления кремния не идеален, что может привести к существенному разбросу
массо-габаритных показателей самого чувствительного элемента. Все эти
отклонения от идеальной модели, положенной в основу проектируемого
изделия, сказываются на выходных характеристиках прибора.
Наиболее рациональным способом достижения требуемых показателей
качества является применение корректирующих устройств (КУ).
Существует множество методов синтеза КУ [1]. Однако, практически все
они разработаны для идеальной математической модели, что на практике редко
встречается.
Данная статья посвящена разработке методики синтеза робастного КУ, на
примере микросистемного акселерометра. В качестве КУ был выбран PID-
регулятор, как наиболее универсальное устройство с известной структурой.
Целью синтеза робастной системы является гарантия требуемого качества
независимо от погрешностей и изменения параметров модели.
Робастная система управления обладает требуемым качеством, несмотря
на существенную неопределенность характеристик объекта управления.
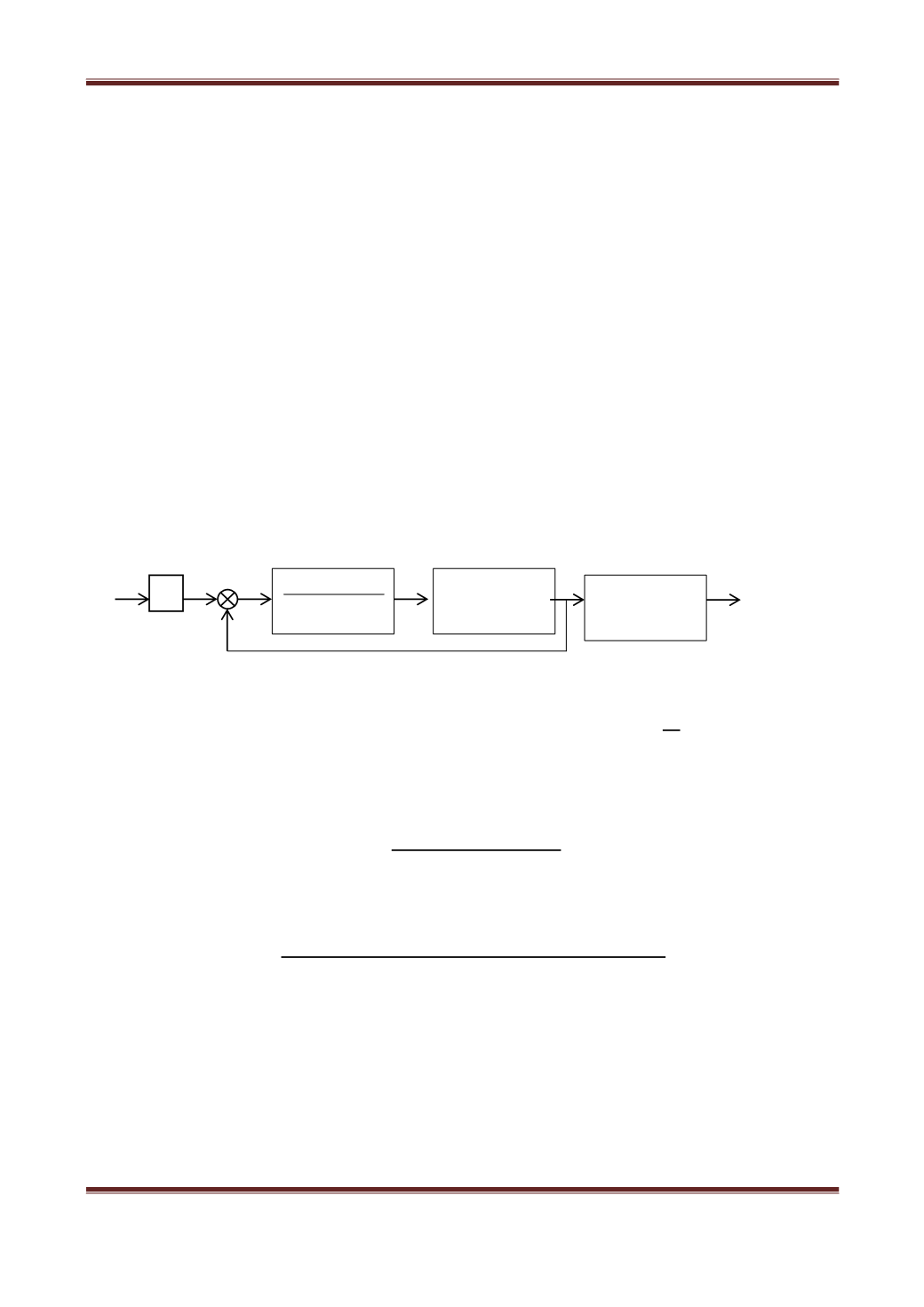
Для микросистемного акселерометра структурная схема примет вид
(Рис. 1)
Рис. 1. Структурная схема микросистемного акселерометра: m-масса;
-
коэффициент демпфирования;
-линейная жесткость;
- ПИД-
регулятор;
-
фильтр, корректирующий динамику системы.
Перейдем к расчету робастного ПИД-регулятора
Пусть необходимо обеспечить
Замкнутая система имеет передаточную функцию
Оптимальные значения коэффициентов характеристического полинома,
обеспечивающие минимум оценки ИВМО [1]:
Параметр
необходимо выбрать, исходя из требования к времени
установления. Выберем
Тогда найдем значения коэффициентов:
m


