" Н а у к а м о л о д ы х " , 2 6 н о я б р я 2 0 1 9 г . , А р з а м а с
П о с в я щ а е т с я 8 5 - л е т и ю в ы с ш е г о п е д а г о г и ч е с к о г о о б р а з о в а н и я в А р з а м а с е и
8 0 - л е т и ю п р о ф е с с о р а В я ч е с л а в а П а в л о в и ч а П у ч к о в а
326
Передаточная функция фильтра
Сравним результаты моделирования микросистемного акселерометра с
оптимальным ПИД-регулятором [1, 4] и робастным ПИД-регулятором.
Проведем три эксперимента:
1.
Масса ЧЭ идеальная (для нее и были рассчитаны оба ПИД-
регулятора) (рис. 2).
2.
Масса ЧЭ увеличена на 10% (рис. 3).
3.
Масса ЧЭ уменьшена на 10% (рис. 4).
Сравнивать будем показатели качества: перерегулирование и время
переходного процесса.
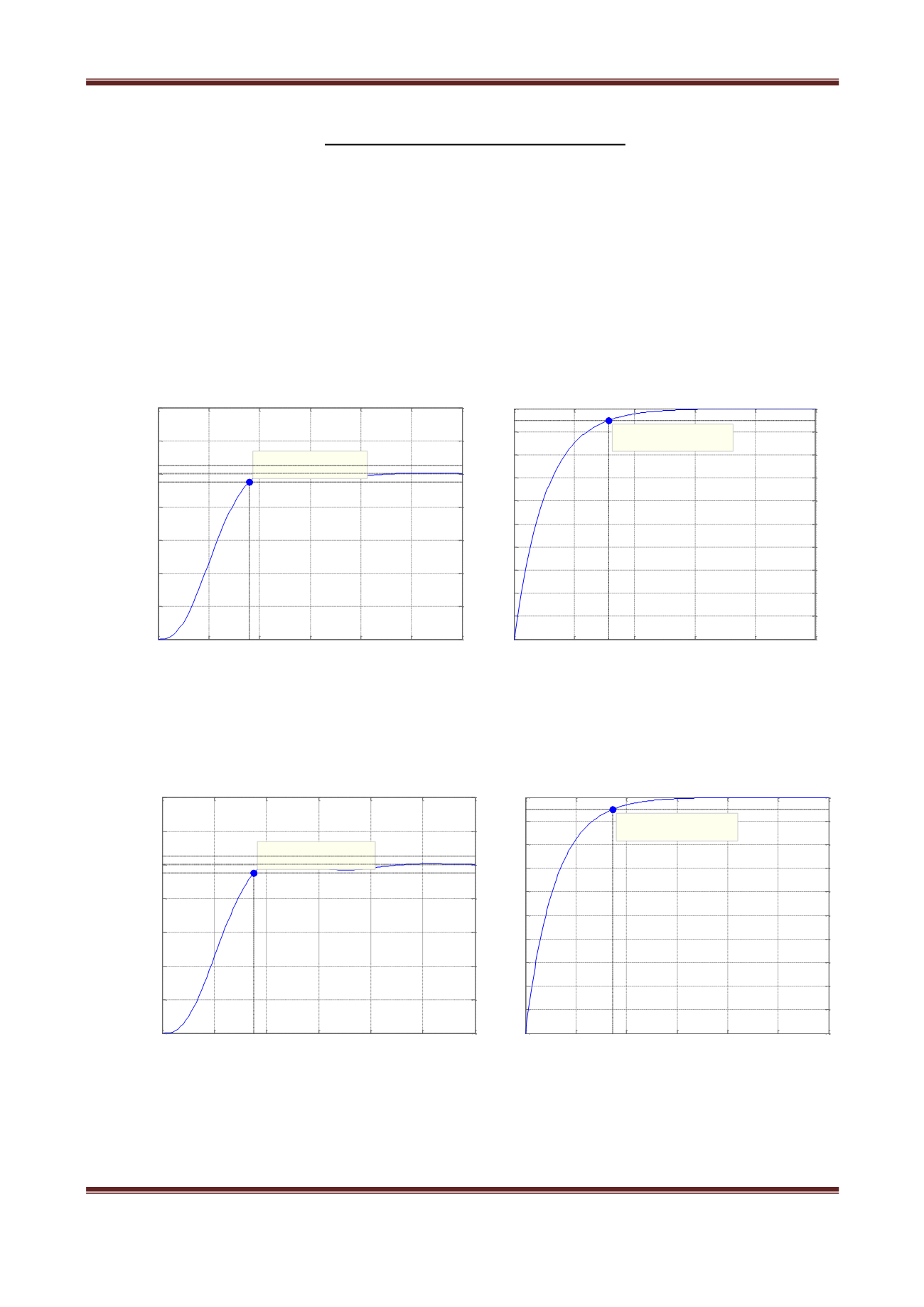
a) –
график с оптимальным
ПИД-регулятором с идеальной
массой чувствительного элемента
b)-
график с робастным ПИД-
регулятором с идеальной массой
чувствительного элемента
Рис. 2. Графики сравнения оптимального и робастного ПИД-регуляторов
a)-
график с оптимальным
ПИД-регулятором с изменением
массы на +10%
b)-
график с робастным ПИД-
регулятором с изменением массы на +10%
Рис. 3. Графики сравнения оптимального и робастного ПИД-регуляторов
Step Response
Time (seconds)
Amplitude
0
0.02
0.04
0.06
0.08
0.1
0.12
0
0.2
0.4
0.6
0.8
1
1.2
1.4
System: Wzam1
Settling time (seconds): 0.0359
Step Response
Time (seconds)
Amplitude
0
0.5
1
1.5
2
2.5
x 10
-5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
System: Wzam2
Settling time (seconds): 7.87e-06
Step Response
Time (seconds)
Amplitude
0
0.02
0.04
0.06
0.08
0.1
0.12
0
0.2
0.4
0.6
0.8
1
1.2
1.4
System: Wzam1
Settling time (seconds): 0.0352
Step Response
Time (seconds)
Amplitude
0
0.5
1
1.5
2
2.5
3
x 10
-5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
System: Wzam2
Settling time (seconds): 8.66e-06


