М а т е р и а л ы X В с е р о с с и й с к о й н а у ч н о - п р а к т и ч е с к о й к о н ф е р е н ц и и
П о с в я щ а е т с я 1 0 0 - л е т и ю Р о с т и с л а в а Е в г е н ь е в и ч а А л е к с е е в а
537
хотя результаты в некоторой степени могут быть применены и для других
типов манипуляторов и механических систем.
Управление с итеративным обучением (УИО) представляет собой метод
управления для повышения эффективности систем, которые неоднократно
выполняют однотипные задачи, на основе знаний из предыдущих действий.
Поскольку промышленный интерес и приложения для управления с
итеративным обучением начали активно расширяться, поэтому интенсивно
развиваются исследования по объединению или использованию результатов
других смежных областей, чтобы усовершенствовать теоретические разработки
данного направления.
Описание модели манипулятора
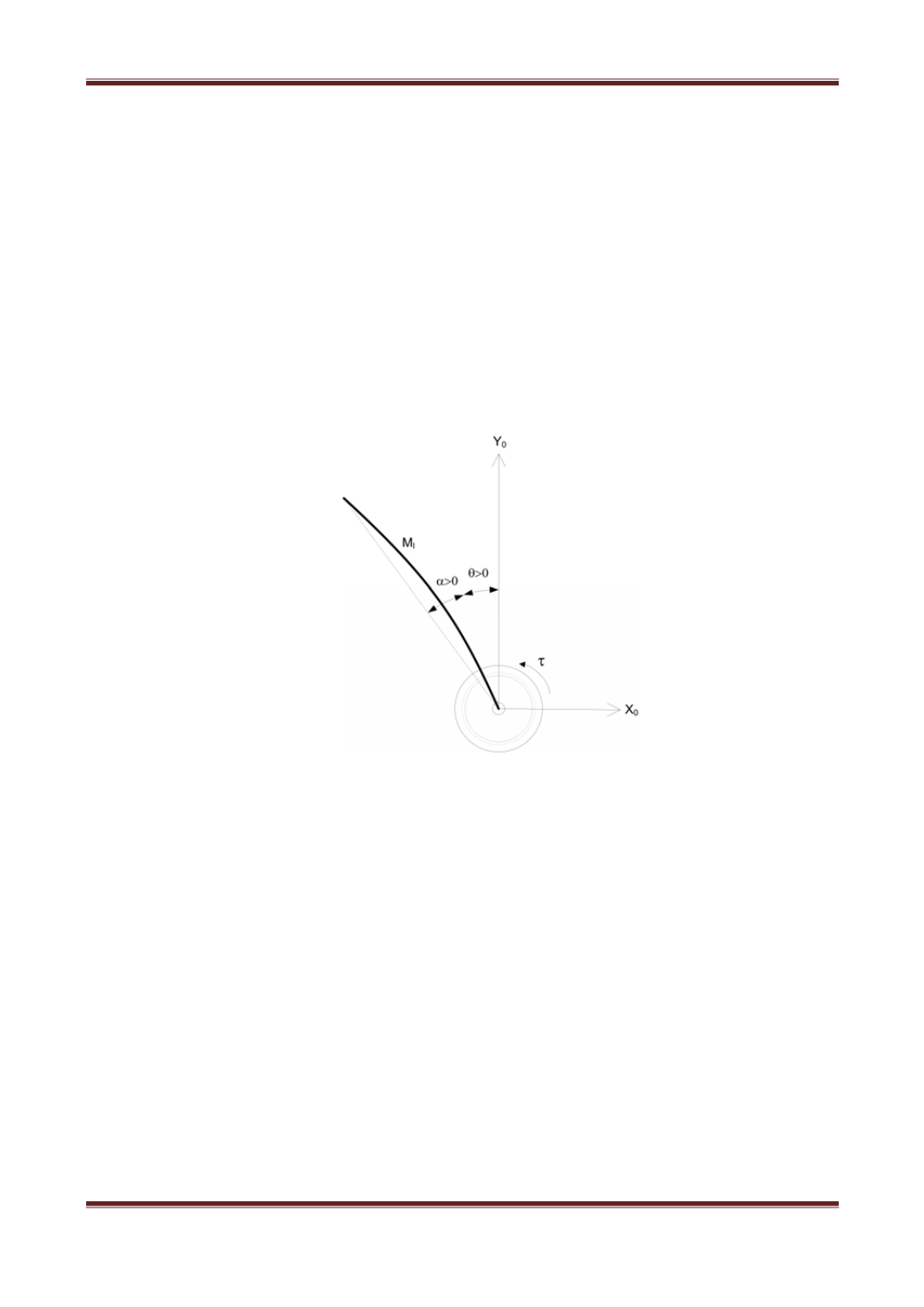
Рассматривается манипулятор с гибким поворотным соединением,
представленным на рисунке 1.
Рис. 1. Углы гибкого поворотного соединения
Динамика манипулятора описывается уравнениями
:
(
)
eq
l
l
eq
J J
J B
θ
α
θ
τ
+ + + =
,
(
)
0
l
l
s
J
B K
θ α
α
α
+ + + =
,
где
θ
- отклонение силового привода,
α
угловое отклонение звена,
eq
B
коэффициент вязкого трения силового привода,
l
B
- вязкий коэффициент затухания,
s
K
- жесткость пружины,
l
J
- момент инерции относительно центра масс,
τ
- крутящий момент.
Зададим вектор состояния в виде
[
]
T
x
θ α θ α
=
и обозначим


