203
приближенных к реальным. В данной статье авторами
представлены фрагменты имеющихся результатов
исследований по данной теме.
II.
Р
АЗРАБОТАННЫЙ МЕТОД НАСТРОЙКИ
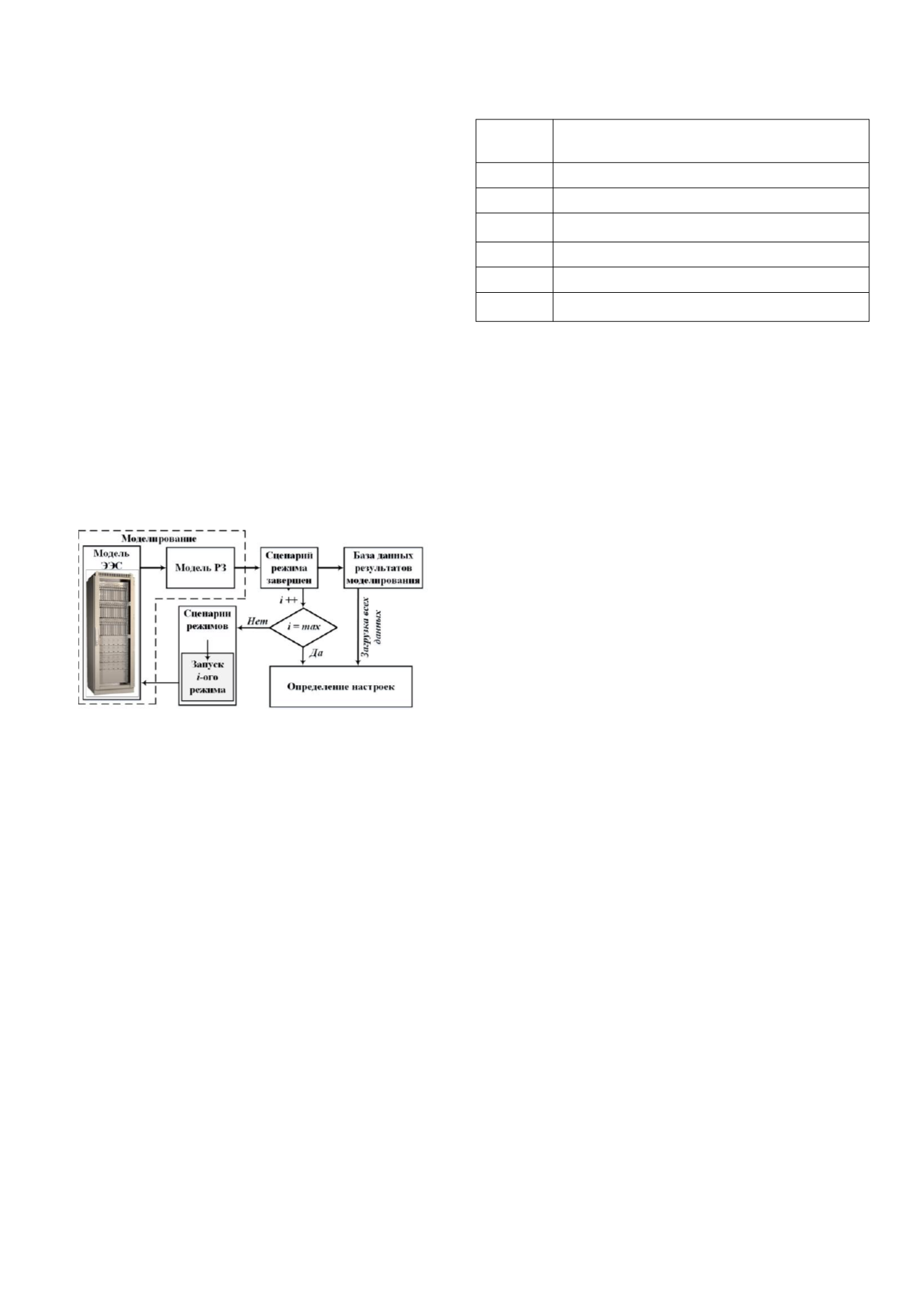
Предлагаемый подход в общем виде описывается
схемой на рисунке 1. Настройки РЗ определяются в
процессе моделирования режимов в совокупной модели
«ЭЭС-РЗ». После того, как выполнена проверка во всех
режимах, формируются уставки для устройства защиты.
Если в итоге РЗ становится нечувствительной к
внутренним повреждениям результаты моделирования в
определенных режимах, от которых защита должна быть
отстроена, могут быть исключены при формировании
настроек РЗ, при условии, что в данном режиме действие
защиты будет заблокировано.
Данный подход позволяет определить настройки РЗ,
учитывая при этом как влияние оборудования ЭЭС, так и
элементов измерительных цепей защиты. При этом он
является гибким с точки зрения адаптации к изменениям в
ЭЭС – добавляя новые модели возобновляемых
источников энергии, FACTS и HVDC систем и др. в модель
ЭЭС,
можно
анализировать
их
влияние
на
функционирование конкретной РЗ и учитывать это
влияние в её настройках естественным образом.
Рис. 1 – Обобщённая структура предлагаемого подхода
Процесс определения уставок дифференциальных
пусковых органов микропроцессорных защит в
соответствии с предлагаемым подходом сводится к
формированию ХС по результатам математического
моделирования функционирования РЗ при различных
внешних КЗ, а также в специфичных режимах ЭЭС
(например,
режимы,
сопровождающиеся
броском
намагничивающего тока (БНТ), режимы перенапряжения),
в которых потенциально возможно некорректное
поведение защиты и от которых она должна быть отстроена
с учётом функционирования необходимых блокировок.
При этом пусковой орган должен надежно срабатывать при
любых внутренних КЗ, в связи с чем также необходимо
выполнить исследование модели РЗ в этих режимах.
В общем случае ХС дифференциального пускового
органа определяется набором параметров, представленным
в таблице 1.
Таблица I.
П
АРАМЕТРЫ НАСТРОЙКИ ХАРАКТЕРИСТИКИ
СРАБАТЫВАНИЯ ДИФФЕРЕНЦИАЛЬНОГО ПУСКОВОГО ОРГАНА
Параметр
Описание
I
diff>
Минимальный ток срабатывания
I
diff>>
Ток срабатывания дифференциальной отсечки
I
base1
Положение точки пересечения характеристики
торможения с осью
X
slope1
Наклон первой ветви характеристики срабатывания
I
base2
Ток начала торможения характеристики
slope2
Минимальная уставка наклона второго участка
характеристики торможения
Алгоритм формирования параметров (таблица 1),
определяющих ХС выглядит следующим образом:
1
Минимальный ток срабатывания
I
diff
>
определяет
первый сектор ХС, на котором защита работает без
торможения, т.е. с нулевым наклоном. Теоретические и
экспериментальные данные свидетельствуют о том, что
только при внутренних КЗ аварийная характеристика
I
d
=
f
(
I
s
) пересекает ХС на данном участке, поскольку
дифференциальный и тормозные токи изменяются в
равной пропорции. Уставка
I
diff
>
по рекомендациям
производителей и стандарта ПАО «ФСК ЕЭС»
регламентирована на уровне 0.2÷0.4 о.е. Более низкий
уровень нежелателен, поскольку может оказаться ниже
тока небаланса, возникающего ввиду погрешностей
преобразования измерительными преобразователями, а
также самого терминала защиты. Более высокий уровень
приведет к снижению чувствительности к внутренним КЗ
и замедлению их отключения. Исходя из этого, в рамках
предлагаемой методологии
I
diff
>
задаётся по рекомендациям
производителя защиты в пределах 0.2÷0.4 о.е.
2
Второй
сектор
ХС
определяется
двумя
параметрами:
I
base
1
и slope1. Наклон ХС позволяет
исключить неправильные действия пускового органа при
внешних КЗ, сопровождающихся насыщением ИТТ.
I
base
1
определяется из минимального значения тормозного тока
аварийной характеристики
I
d
=
f
(
I
s
) при внешних КЗ:
(
)
(
)
(
)
1 2
1 1 1
1 2
2 2
2
1
1 2
min , ...
min , ...
min
...
min , ...
k
s
s
s
k
s
s
s
base
k
sn sn sn
I I I
I I I
I
I I I
=
(1)
Для определения наклона второго участка ХС slope1
определяются координаты точки
p
1
(2) – самая близкая к
оси ординат точка аварийных характеристик внешних КЗ,
при условии, что она находится выше минимального тока
срабатывания
I
diff
>
.
По координате
X
, равной некоторому значению
тормозного
тока,
выбирается
соответствующий
дифференциальный ток
I
d
, формирующий координату
Y
точки
p
1
(3).


