139
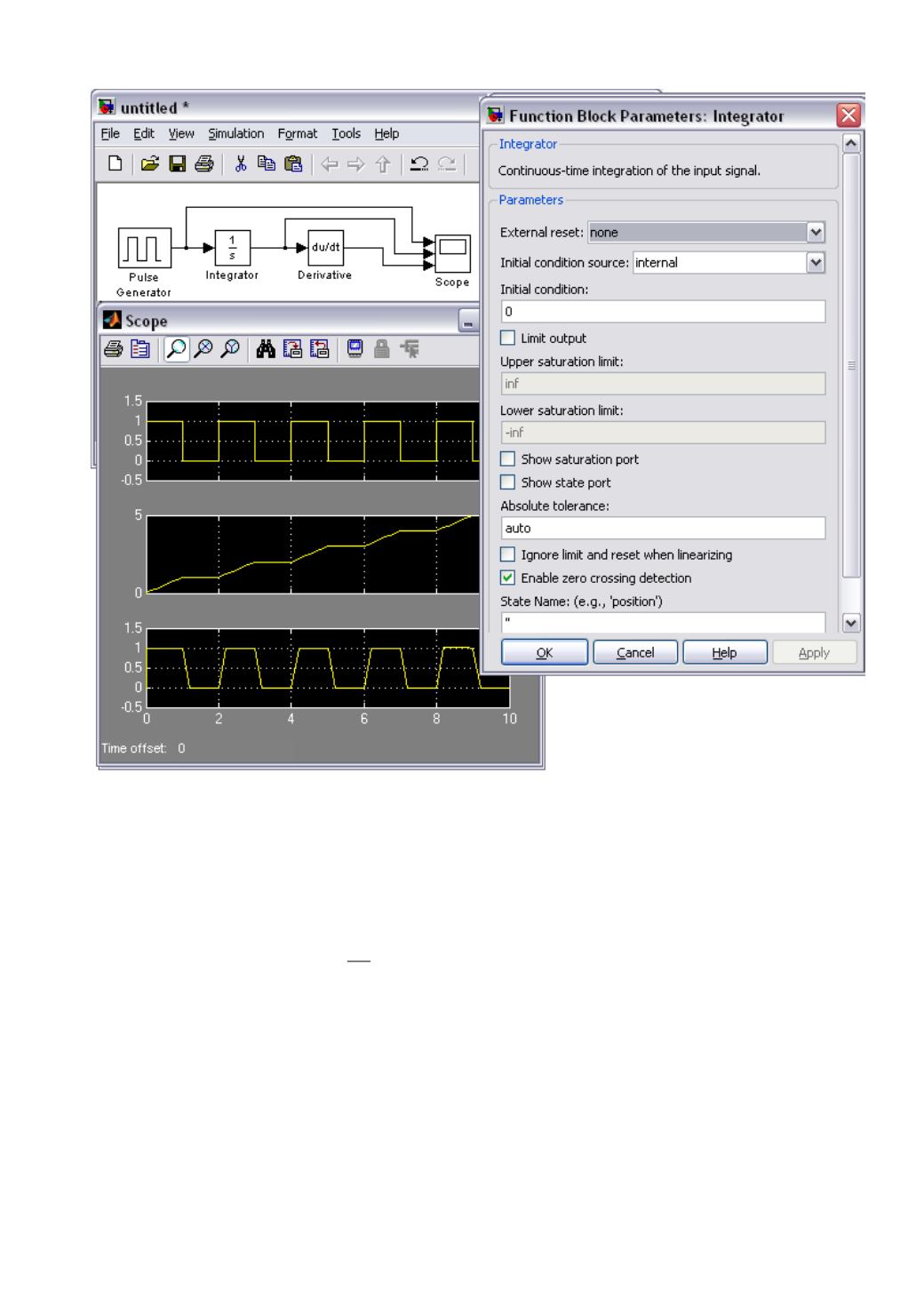
Рис. 13.1. Интегрирование прямоугольных импульсов
с последующим дифференцированием
13. 3. Блок модели динамического объекта State-Space
Создает динамический объект, заданнный в пространстве состояний:
Bu Ax
dt
dx
+ =
(13.1)
Du Cx y
+ =
(13.2)
где
х
– вектор состояния,
u
– вектор входных воздействий и
у
– вектор
выходных сигналов.
Параметры:
1.
A
–матрица системы;
2.
B
– матрица управления;
3.
C
– матрица выхода;
4.
D
– матрица прямой связи;


