61
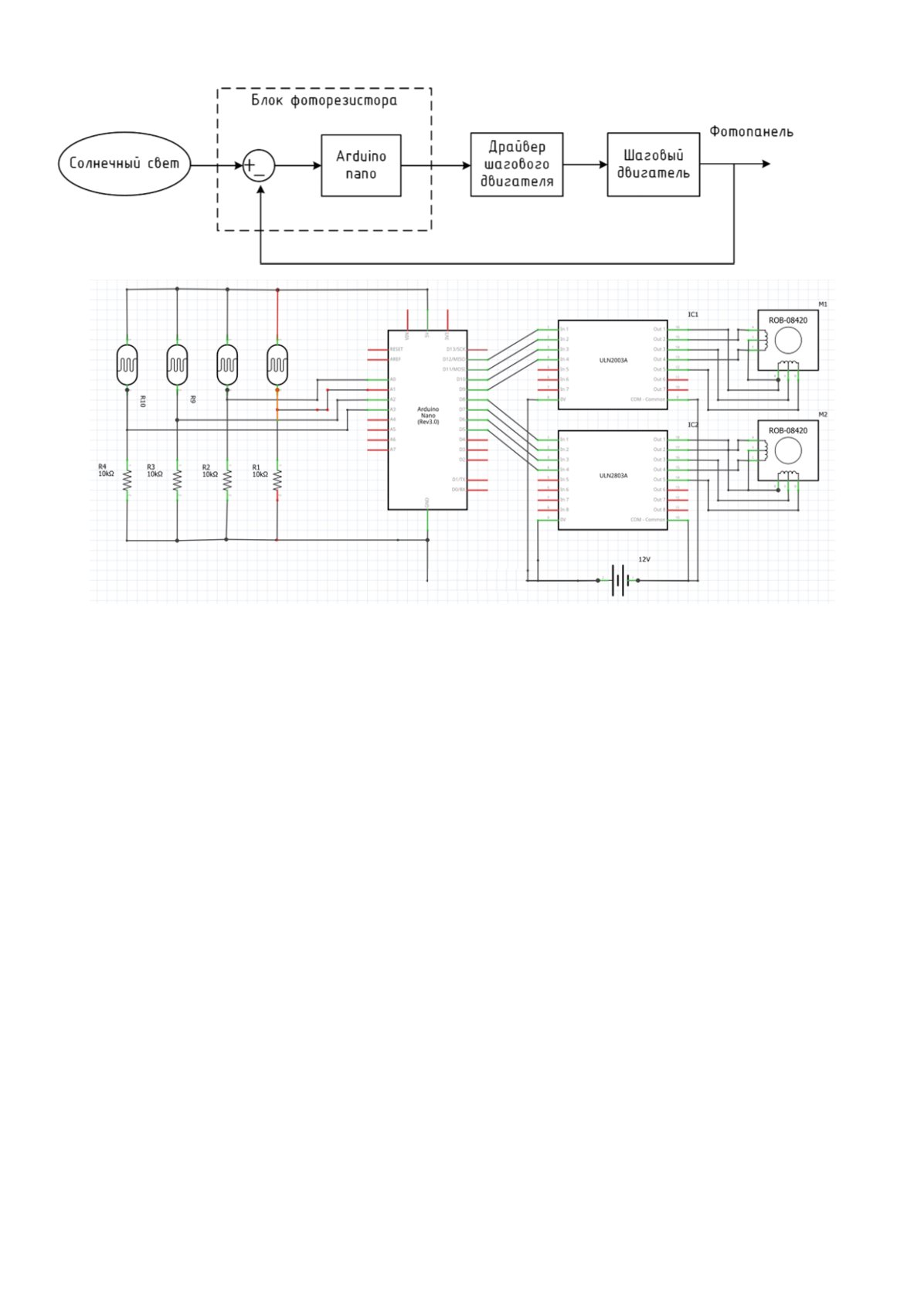
Рис. 1 – Блок-схема непрерывной системы слежения за солнцем
Рис. 2 – Принципиальная схема непрерывной системы слежения за солнцем
Для управления наклоном солнечной панели
использована
плата
Arduino
Nano
на
базе
микроконтроллера ATmega328P. Плата имеет 14
цифровых входов/выходов, шесть из которых могут
использоваться как выходы широтно-импульсного
модулятора (ШИМ) с разрешением 8 бит. ШИМ
используется для получения изменяющегося аналогового
значения посредством цифровых устройств, при этом
сигнал моделирует напряжение между максимальным и
минимальным значениями (5 В и 0 В соответственно) при
изменении длительности включения и отключения. Также
плата Arduino Nano содержит восемь аналоговых входов с
разрешением 10 бит (т.е. способны принимать 1024
различных значений), которые предназначены для чтения
аналоговых датчиков, кварцевый резонатор с частотой 16
МГц, флеш-память на 32 Кб. Платформа Arduino Nano
поддерживает последовательный интерфейс UART TTL (5
В), микроконтроллер ATmega328P позволяет осуществить
связь одного из приемопередатчиков с USB-портом
компьютера. Микросхема FTDI FT232RL получает
питание при подключении платы к компьютеру/источнику
питания через кабель Mini-B USB. Программирование
осуществляется за счет программного обеспечения
Arduino [1]. Микроконтроллер ATmega328P поставляется с
прошитым загрузчиком, благодаря чему возможна
загрузка нового кода без использования внешнего
программатора. Во время программирования происходит
задержка первых байтов кода, поэтому необходимо
задание секунды ожидания программой на компьютере
перед
осуществлением
передачи
данных.
Язык
программирования Arduino основан на С/С++.
В качестве движущего механизма были выбраны
электроприводы с шаговыми двигателями. Преимущество
шаговых
двигателей
заключается
в
отсутствии
механически трущихся деталей, что обуславливает
высокую надежность механизма.
В качестве связующего звена между двигателем и
цепями управления используется драйвер шагового
двигателя ULN2003APG на базе ULN2003, который
предназначен для принятия слаботочного управляющего
сигнала и преобразования его в более сильный сигнал для
управления двигателем. Микросхема ULN2003 является
транзисторной сборкой Дарлингтона с выходными
ключами повышенной мощности. Каждый канал
рассчитан на нагрузку 500 mА [2].
При использовании фоторезисторов, расположенных на
углах четырёхугольника, происходит считывание сигналов
каждого из них с последующим сравнением полученных
сигналов. Сопротивление фоторезисторов увеличивается с
уменьшением
интенсивности света. Расположение
датчиков за перегородками позволяет при изменении
положения солнца создать тень, таким образом
считываемые сигналы оказываются неравными из-за
неравномерной освещенности. Модель расположения
фоторезисторов, выполненная в программном комплексе
SketchUp, представлена на рис. 3. В зависимости от
разницы сигналов система управления подает команду
шаговым двигателям на поворот в заданную программным
алгоритмом сторону.


